当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Actively Perceiving and Responsive Soft Robots Enabled by Self‐Powered, Highly Extensible, and Highly Sensitive Triboelectric Proximity‐ and Pressure‐Sensing Skins
Advanced Materials ( IF 27.4 ) Pub Date : 2018-06-04 , DOI: 10.1002/adma.201801114 Ying-Chih Lai,Jianan Deng,Ruiyuan Liu,Yung-Chi Hsiao,Steven L. Zhang,Wenbo Peng,Hsing-Mei Wu,Xingfu Wang,Zhong Lin Wang
Advanced Materials ( IF 27.4 ) Pub Date : 2018-06-04 , DOI: 10.1002/adma.201801114 Ying-Chih Lai,Jianan Deng,Ruiyuan Liu,Yung-Chi Hsiao,Steven L. Zhang,Wenbo Peng,Hsing-Mei Wu,Xingfu Wang,Zhong Lin Wang
|
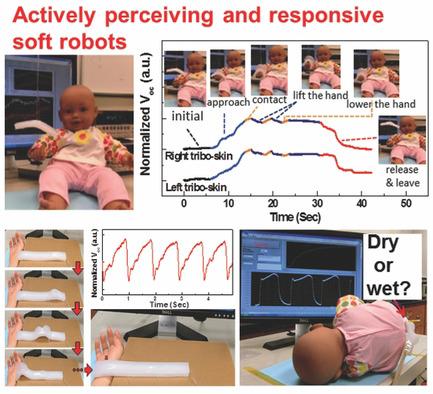
Robots that can move, feel, and respond like organisms will bring revolutionary impact to today's technologies. Soft robots with organism‐like adaptive bodies have shown great potential in vast robot–human and robot–environment applications. Developing skin‐like sensory devices allows them to naturally sense and interact with environment. Also, it would be better if the capabilities to feel can be active, like real skin. However, challenges in the complicated structures, incompatible moduli, poor stretchability and sensitivity, large driving voltage, and power dissipation hinder applicability of conventional technologies. Here, various actively perceivable and responsive soft robots are enabled by self‐powered active triboelectric robotic skins (tribo‐skins) that simultaneously possess excellent stretchability and excellent sensitivity in the low‐pressure regime. The tribo‐skins can actively sense proximity, contact, and pressure to external stimuli via self‐generating electricity. The driving energy comes from a natural triboelectrification effect involving the cooperation of contact electrification and electrostatic induction. The perfect integration of the tribo‐skins and soft actuators enables soft robots to perform various actively sensing and interactive tasks including actively perceiving their muscle motions, working states, textile's dampness, and even subtle human physiological signals. Moreover, the self‐generating signals can drive optoelectronic devices for visual communication and be processed for diverse sophisticated uses.
中文翻译:

通过自供电,高度可扩展和高度敏感的摩擦电接近和压力感应皮肤实现主动感知和响应的软机器人
像生物一样可以移动,感知和响应的机器人将为当今的技术带来革命性的影响。具有像生物一样的适应性身体的软机器人在广阔的人类和机器人环境应用中显示出了巨大的潜力。开发类似皮肤的感觉设备可以使它们自然地感知环境并与环境互动。此外,最好能像真实皮肤一样活跃感觉的能力。但是,结构复杂,模量不兼容,拉伸性和灵敏度差,驱动电压大以及功耗大等问题阻碍了常规技术的应用。这里,自供电的主动摩擦电动机器人皮肤(tribo-skins)可实现各种主动感知和响应的软机器人,该机器人皮肤在低压状态下同时具有出色的可拉伸性和出色的灵敏度。摩擦皮可以通过自发电来主动感应与外界刺激的接近,接触和压力。驱动能量来自自然的摩擦起电效应,涉及接触起电和静电感应的协同作用。摩擦皮和软致动器的完美结合使软机器人可以执行各种主动感应和交互任务,包括主动感知其肌肉运动,工作状态,纺织品的潮湿甚至微妙的人体生理信号。而且,
更新日期:2018-06-04
中文翻译:
通过自供电,高度可扩展和高度敏感的摩擦电接近和压力感应皮肤实现主动感知和响应的软机器人
像生物一样可以移动,感知和响应的机器人将为当今的技术带来革命性的影响。具有像生物一样的适应性身体的软机器人在广阔的人类和机器人环境应用中显示出了巨大的潜力。开发类似皮肤的感觉设备可以使它们自然地感知环境并与环境互动。此外,最好能像真实皮肤一样活跃感觉的能力。但是,结构复杂,模量不兼容,拉伸性和灵敏度差,驱动电压大以及功耗大等问题阻碍了常规技术的应用。这里,自供电的主动摩擦电动机器人皮肤(tribo-skins)可实现各种主动感知和响应的软机器人,该机器人皮肤在低压状态下同时具有出色的可拉伸性和出色的灵敏度。摩擦皮可以通过自发电来主动感应与外界刺激的接近,接触和压力。驱动能量来自自然的摩擦起电效应,涉及接触起电和静电感应的协同作用。摩擦皮和软致动器的完美结合使软机器人可以执行各种主动感应和交互任务,包括主动感知其肌肉运动,工作状态,纺织品的潮湿甚至微妙的人体生理信号。而且,

















































 京公网安备 11010802027423号
京公网安备 11010802027423号