当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Untethered Recyclable Tubular Actuators with Versatile Locomotion for Soft Continuum Robots
Advanced Materials ( IF 27.4 ) Pub Date : 2018-05-27 , DOI: 10.1002/adma.201801103 Xiaojie Qian,Qiaomei Chen,Yang Yang,Yanshuang Xu,Zhen Li,Zhenhua Wang,Yahe Wu,Yen Wei,Yan Ji
Advanced Materials ( IF 27.4 ) Pub Date : 2018-05-27 , DOI: 10.1002/adma.201801103 Xiaojie Qian,Qiaomei Chen,Yang Yang,Yanshuang Xu,Zhen Li,Zhenhua Wang,Yahe Wu,Yen Wei,Yan Ji
|
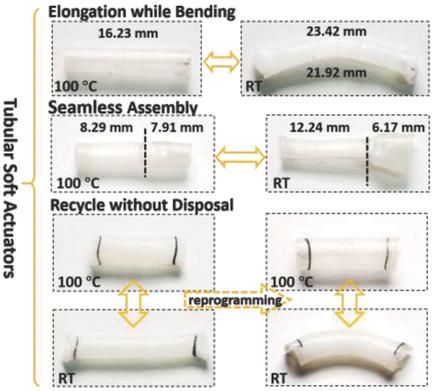
Stimuli‐responsive materials offer a distinguished platform to build tether‐free compact soft robots, which can combine sensing and actuation without a linked power supply. In the past, tubular soft robots have to be made by multiple components with various internal channels or complex cavities assembled together. Moreover, robust processing, complex locomotion, simple structure, and easy recyclability represent major challenges in this area. Here, it is shown that those challenges can be tackled by liquid crystalline elastomers with allyl sulfide functional groups. The light‐controlled exchange reaction between allyl sulfide groups allows flexible processing of tubular soft robots/actuators, which does not need any assisting materials. Complex locomotion demonstrated here includes reversible simultaneous bending and elongation; reversible diameter expansion; and omnidirectional bending via remote infrared light control. Different modes of actuation can be programmed into the same tube without the routine assembly of multiple tubes as used in the past. In addition, the exchange reaction also makes it possible to use the same single tube repeatedly to perform different functions by erasing and reprogramming.
中文翻译:

用于软连续体机器人的具有多功能运动功能的不受束缚的可回收管状执行器
刺激响应材料为构建无绳紧凑型软机器人提供了一个独特的平台,该机器人可以将传感和驱动结合起来,而无需连接电源。过去,管状软体机器人必须由具有各种内部通道或复杂腔体的多个组件组装在一起制成。此外,鲁棒的加工、复杂的运动、简单的结构和易于回收是该领域的主要挑战。研究表明,具有烯丙基硫醚官能团的液晶弹性体可以解决这些挑战。烯丙基硫基团之间的光控交换反应允许灵活地加工管状软机器人/执行器,不需要任何辅助材料。这里演示的复杂运动包括可逆的同时弯曲和伸长;可逆扩径;以及通过远程红外光控制进行全向弯曲。可以将不同的致动模式编程到同一管中,而无需像过去那样对多个管进行常规组装。此外,交换反应还使得可以重复使用同一单管,通过擦除和重新编程来执行不同的功能。
更新日期:2018-05-27
中文翻译:
用于软连续体机器人的具有多功能运动功能的不受束缚的可回收管状执行器
刺激响应材料为构建无绳紧凑型软机器人提供了一个独特的平台,该机器人可以将传感和驱动结合起来,而无需连接电源。过去,管状软体机器人必须由具有各种内部通道或复杂腔体的多个组件组装在一起制成。此外,鲁棒的加工、复杂的运动、简单的结构和易于回收是该领域的主要挑战。研究表明,具有烯丙基硫醚官能团的液晶弹性体可以解决这些挑战。烯丙基硫基团之间的光控交换反应允许灵活地加工管状软机器人/执行器,不需要任何辅助材料。这里演示的复杂运动包括可逆的同时弯曲和伸长;可逆扩径;以及通过远程红外光控制进行全向弯曲。可以将不同的致动模式编程到同一管中,而无需像过去那样对多个管进行常规组装。此外,交换反应还使得可以重复使用同一单管,通过擦除和重新编程来执行不同的功能。






























 京公网安备 11010802027423号
京公网安备 11010802027423号