Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Controlled flight of a microrobot powered by soft artificial muscles
Nature ( IF 50.5 ) Pub Date : 2019-11-04 , DOI: 10.1038/s41586-019-1737-7 Yufeng Chen 1, 2, 3 , Huichan Zhao 4 , Jie Mao 1, 5 , Pakpong Chirarattananon 6 , E Farrell Helbling 1, 2 , Nak-Seung Patrick Hyun 1, 2 , David R Clarke 1 , Robert J Wood 1, 2
Nature ( IF 50.5 ) Pub Date : 2019-11-04 , DOI: 10.1038/s41586-019-1737-7 Yufeng Chen 1, 2, 3 , Huichan Zhao 4 , Jie Mao 1, 5 , Pakpong Chirarattananon 6 , E Farrell Helbling 1, 2 , Nak-Seung Patrick Hyun 1, 2 , David R Clarke 1 , Robert J Wood 1, 2
Affiliation
|
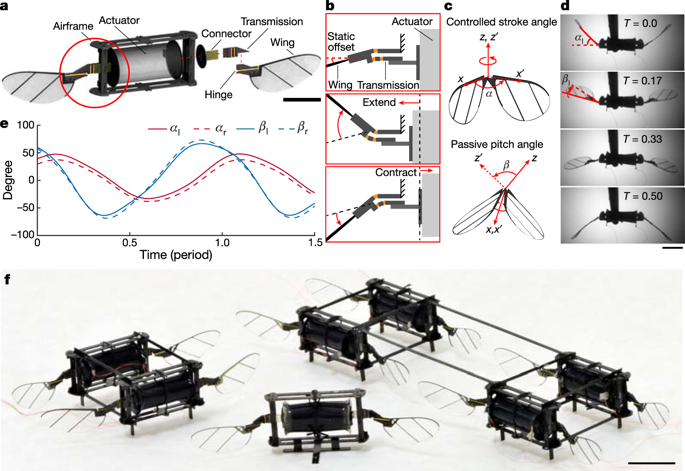
Flying insects capable of navigating in highly cluttered natural environments can withstand in-flight collisions because of the combination of their low inertia1 and the resilience of their wings2, exoskeletons1 and muscles. Current insect-scale (less than ten centimetres long and weighing less than five grams) aerial robots3–6 use rigid microscale actuators, which are typically fragile under external impact. Biomimetic artificial muscles7–10 that are capable of large deformation offer a promising alternative for actuation because they can endure the stresses caused by such impacts. However, existing soft actuators11–13 have not yet demonstrated sufficient power density to achieve lift-off, and their actuation nonlinearity and limited bandwidth create further challenges for achieving closed-loop (driven by an input control signal that is adjusted based on sensory feedback) flight control. Here we develop heavier-than-air aerial robots powered by soft artificial muscles that demonstrate open-loop (driven by a predetermined signal without feedback), passively stable (upright during flight) ascending flight as well as closed-loop, hovering flight. The robots are driven by multi-layered dielectric elastomer actuators that weigh 100 milligrams each and have a resonance frequency of 500 hertz and power density of 600 watts per kilogram. To increase the mechanical power output of the actuator and to demonstrate flight control, we present ways to overcome challenges unique to soft actuators, such as nonlinear transduction and dynamic buckling. These robots can sense and withstand collisions with surrounding obstacles and can recover from in-flight collisions by exploiting material robustness and vehicle passive stability. We also fly two micro-aerial vehicles simultaneously in a cluttered environment. They collide with the wall and each other without suffering damage. These robots rely on offboard amplifiers and an external motion-capture system to provide power to the dielectric elastomer actuators and to control their flight. Our work demonstrates how soft actuators can achieve sufficient power density and bandwidth to enable controlled flight, illustrating the potential of developing next-generation agile soft robots.Heavier-than-air insect-scale aerial robots powered by soft artificial muscles can hover and also recover from in-flight collisions, illustrating the potential for developing next-generation agile soft robots.
中文翻译:

由柔软的人造肌肉驱动的微型机器人的受控飞行
能够在高度杂乱的自然环境中航行的飞行昆虫可以承受飞行中的碰撞,因为它们的低惯性1和它们的翅膀2、外骨骼1和肌肉的弹性相结合。当前的昆虫规模(长度小于 10 厘米,重量小于 5 克)空中机器人 3-6 使用刚性微型致动器,这些致动器在外部冲击下通常很脆弱。能够进行大变形的仿生人造肌肉 7-10 为驱动提供了一种有前途的替代方案,因为它们可以承受此类冲击引起的压力。然而,现有的软执行器 11-13 尚未展示出足够的功率密度来实现升空,它们的驱动非线性和有限的带宽为实现闭环(由基于感官反馈调整的输入控制信号驱动)飞行控制带来了进一步的挑战。在这里,我们开发了由柔软的人造肌肉驱动的重于空气的空中机器人,这些机器人展示了开环(由没有反馈的预定信号驱动)、被动稳定(飞行期间直立)上升飞行以及闭环悬停飞行。这些机器人由多层介电弹性体致动器驱动,每个致动器重 100 毫克,共振频率为 500 赫兹,功率密度为每公斤 600 瓦。为了增加执行器的机械功率输出并展示飞行控制,我们提出了克服软执行器所特有的挑战的方法,例如非线性转换和动态屈曲。这些机器人可以感知和承受与周围障碍物的碰撞,并可以通过利用材料的坚固性和车辆的被动稳定性从飞行中的碰撞中恢复。我们还在杂乱的环境中同时驾驶两架微型飞行器。它们与墙壁和彼此碰撞而不会受到损坏。这些机器人依靠机外放大器和外部运动捕捉系统为介电弹性体致动器提供动力并控制它们的飞行。我们的工作展示了软执行器如何实现足够的功率密度和带宽以实现受控飞行,展示了开发下一代敏捷软机器人的潜力。
更新日期:2019-11-04
中文翻译:
由柔软的人造肌肉驱动的微型机器人的受控飞行
能够在高度杂乱的自然环境中航行的飞行昆虫可以承受飞行中的碰撞,因为它们的低惯性1和它们的翅膀2、外骨骼1和肌肉的弹性相结合。当前的昆虫规模(长度小于 10 厘米,重量小于 5 克)空中机器人 3-6 使用刚性微型致动器,这些致动器在外部冲击下通常很脆弱。能够进行大变形的仿生人造肌肉 7-10 为驱动提供了一种有前途的替代方案,因为它们可以承受此类冲击引起的压力。然而,现有的软执行器 11-13 尚未展示出足够的功率密度来实现升空,它们的驱动非线性和有限的带宽为实现闭环(由基于感官反馈调整的输入控制信号驱动)飞行控制带来了进一步的挑战。在这里,我们开发了由柔软的人造肌肉驱动的重于空气的空中机器人,这些机器人展示了开环(由没有反馈的预定信号驱动)、被动稳定(飞行期间直立)上升飞行以及闭环悬停飞行。这些机器人由多层介电弹性体致动器驱动,每个致动器重 100 毫克,共振频率为 500 赫兹,功率密度为每公斤 600 瓦。为了增加执行器的机械功率输出并展示飞行控制,我们提出了克服软执行器所特有的挑战的方法,例如非线性转换和动态屈曲。这些机器人可以感知和承受与周围障碍物的碰撞,并可以通过利用材料的坚固性和车辆的被动稳定性从飞行中的碰撞中恢复。我们还在杂乱的环境中同时驾驶两架微型飞行器。它们与墙壁和彼此碰撞而不会受到损坏。这些机器人依靠机外放大器和外部运动捕捉系统为介电弹性体致动器提供动力并控制它们的飞行。我们的工作展示了软执行器如何实现足够的功率密度和带宽以实现受控飞行,展示了开发下一代敏捷软机器人的潜力。




















































 京公网安备 11010802027423号
京公网安备 11010802027423号