Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Particle robotics based on statistical mechanics of loosely coupled components
Nature ( IF 50.5 ) Pub Date : 2019-03-01 , DOI: 10.1038/s41586-019-1022-9
Shuguang Li , Richa Batra , David Brown , Hyun-Dong Chang , Nikhil Ranganathan , Chuck Hoberman , Daniela Rus , Hod Lipson
Nature ( IF 50.5 ) Pub Date : 2019-03-01 , DOI: 10.1038/s41586-019-1022-9
Shuguang Li , Richa Batra , David Brown , Hyun-Dong Chang , Nikhil Ranganathan , Chuck Hoberman , Daniela Rus , Hod Lipson
|
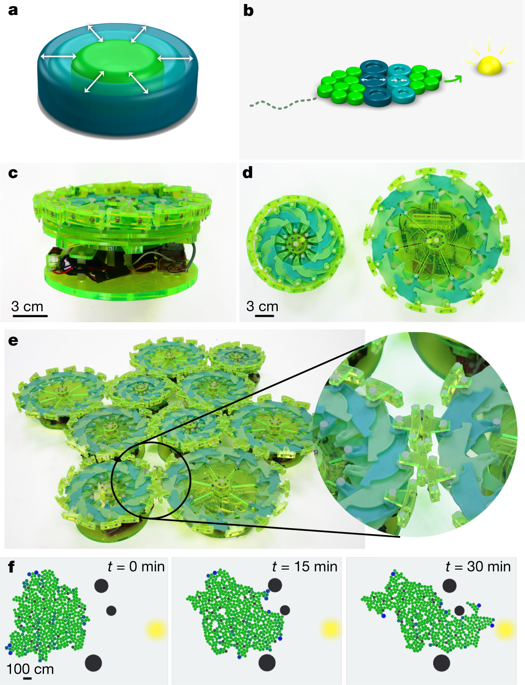
Biological organisms achieve robust high-level behaviours by combining and coordinating stochastic low-level components1–3. By contrast, most current robotic systems comprise either monolithic mechanisms4,5 or modular units with coordinated motions6,7. Such robots require explicit control of individual components to perform specific functions, and the failure of one component typically renders the entire robot inoperable. Here we demonstrate a robotic system whose overall behaviour can be successfully controlled by exploiting statistical mechanics phenomena. We achieve this by incorporating many loosely coupled ‘particles’, which are incapable of independent locomotion and do not possess individual identity or addressable position. In the proposed system, each particle is permitted to perform only uniform volumetric oscillations that are phase-modulated by a global signal. Despite the stochastic motion of the robot and lack of direct control of its individual components, we demonstrate physical robots composed of up to two dozen particles and simulated robots with up to 100,000 particles capable of robust locomotion, object transport and phototaxis (movement towards a light stimulus). Locomotion is maintained even when 20 per cent of the particles malfunction. These findings indicate that stochastic systems may offer an alternative approach to more complex and exacting robots via large-scale robust amorphous robotic systems that exhibit deterministic behaviour.A stochastic robotic system shows deterministic behaviour—such as locomotion, object transport and phototaxis—from the collective motion of many loosely coupled disk-shaped ‘particles’ that perform only volumetric oscillations.
中文翻译:

基于松耦合组件统计力学的粒子机器人
生物有机体通过组合和协调随机的低级组件 1-3 来实现强大的高级行为。相比之下,大多数当前的机器人系统包括整体机构 4、5 或具有协调运动的模块化单元 6、7。此类机器人需要对单个组件进行明确控制以执行特定功能,并且一个组件的故障通常会导致整个机器人无法运行。在这里,我们展示了一个机器人系统,其整体行为可以通过利用统计力学现象成功控制。我们通过合并许多松散耦合的“粒子”来实现这一点,这些粒子不能独立运动,也不具有个人身份或可寻址位置。在提议的系统中,每个粒子只允许执行由全局信号相位调制的均匀体积振荡。尽管机器人是随机运动并且缺乏对其各个组件的直接控制,但我们展示了由多达两打粒子组成的物理机器人和具有多达 100,000 个粒子的模拟机器人,能够进行稳健的运动、物体运输和趋光性(朝向光的运动)刺激)。即使 20% 的粒子出现故障,运动也会保持。这些发现表明,随机系统可以通过表现出确定性行为的大规模鲁棒无定形机器人系统为更复杂和更精确的机器人提供另一种方法。随机机器人系统表现出确定性行为——例如运动、
更新日期:2019-03-01
中文翻译:
基于松耦合组件统计力学的粒子机器人
生物有机体通过组合和协调随机的低级组件 1-3 来实现强大的高级行为。相比之下,大多数当前的机器人系统包括整体机构 4、5 或具有协调运动的模块化单元 6、7。此类机器人需要对单个组件进行明确控制以执行特定功能,并且一个组件的故障通常会导致整个机器人无法运行。在这里,我们展示了一个机器人系统,其整体行为可以通过利用统计力学现象成功控制。我们通过合并许多松散耦合的“粒子”来实现这一点,这些粒子不能独立运动,也不具有个人身份或可寻址位置。在提议的系统中,每个粒子只允许执行由全局信号相位调制的均匀体积振荡。尽管机器人是随机运动并且缺乏对其各个组件的直接控制,但我们展示了由多达两打粒子组成的物理机器人和具有多达 100,000 个粒子的模拟机器人,能够进行稳健的运动、物体运输和趋光性(朝向光的运动)刺激)。即使 20% 的粒子出现故障,运动也会保持。这些发现表明,随机系统可以通过表现出确定性行为的大规模鲁棒无定形机器人系统为更复杂和更精确的机器人提供另一种方法。随机机器人系统表现出确定性行为——例如运动、
































 京公网安备 11010802027423号
京公网安备 11010802027423号