当前位置:
X-MOL 学术
›
Nat. Commun.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Climbing favours the tripod gait over alternative faster insect gaits.
Nature Communications ( IF 14.7 ) Pub Date : 2017-02-17 , DOI: 10.1038/ncomms14494 Pavan Ramdya , Robin Thandiackal , Raphael Cherney , Thibault Asselborn , Richard Benton , Auke Jan Ijspeert , Dario Floreano
Nature Communications ( IF 14.7 ) Pub Date : 2017-02-17 , DOI: 10.1038/ncomms14494 Pavan Ramdya , Robin Thandiackal , Raphael Cherney , Thibault Asselborn , Richard Benton , Auke Jan Ijspeert , Dario Floreano
|
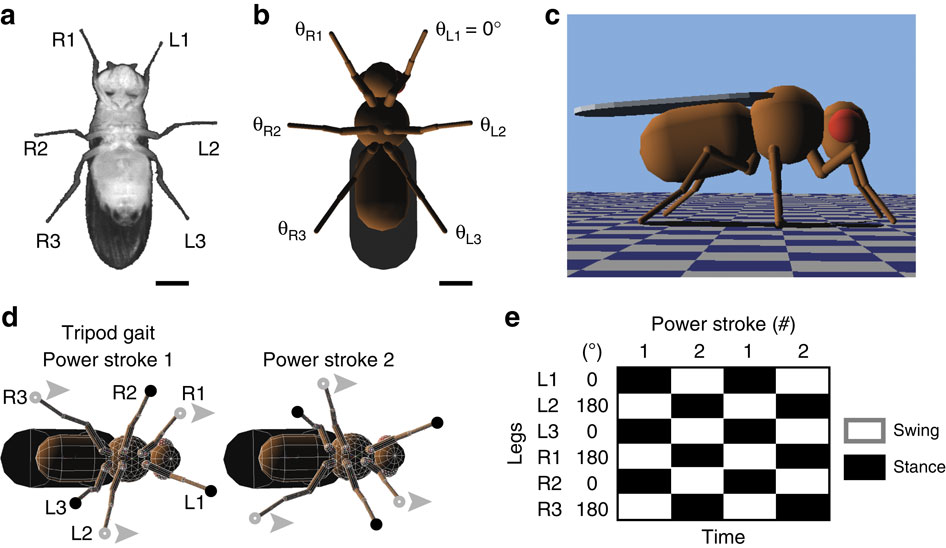
To escape danger or catch prey, running vertebrates rely on dynamic gaits with minimal ground contact. By contrast, most insects use a tripod gait that maintains at least three legs on the ground at any given time. One prevailing hypothesis for this difference in fast locomotor strategies is that tripod locomotion allows insects to rapidly navigate three-dimensional terrain. To test this, we computationally discovered fast locomotor gaits for a model based on Drosophila melanogaster. Indeed, the tripod gait emerges to the exclusion of many other possible gaits when optimizing fast upward climbing with leg adhesion. By contrast, novel two-legged bipod gaits are fastest on flat terrain without adhesion in the model and in a hexapod robot. Intriguingly, when adhesive leg structures in real Drosophila are covered, animals exhibit atypical bipod-like leg coordination. We propose that the requirement to climb vertical terrain may drive the prevalence of the tripod gait over faster alternative gaits with minimal ground contact.
中文翻译:

与其他更快的昆虫步态相比,爬坡更喜欢三脚架步态。
为了逃避危险或捕获猎物,奔跑的脊椎动物依靠动态步态并尽量减少与地面的接触。相比之下,大多数昆虫都使用三脚架步态,该步态在任何给定时间至少将三条腿保持在地面上。关于这种快速运动策略差异的一个普遍的假设是,三脚架运动可以使昆虫迅速在三维地形上导航。为了测试这一点,我们通过计算发现了以果蝇为基础的模型的快速运动步态。的确,在通过腿部附着力优化快速向上攀爬时,三脚架的步态被排除在许多其他可能的步态之外。相比之下,新颖的两足脚架步态在平坦地形上最快,并且在模型和六脚架机器人中没有附着力。有趣的是,当果蝇的腿部结构被覆盖时,动物表现出非典型的两足动物般的腿协调性。我们建议,攀登垂直地形的要求可能会导致三脚架步态的普及率超过以最小的地面接触而产生的更快的替代步态。
更新日期:2017-02-19
中文翻译:
与其他更快的昆虫步态相比,爬坡更喜欢三脚架步态。
为了逃避危险或捕获猎物,奔跑的脊椎动物依靠动态步态并尽量减少与地面的接触。相比之下,大多数昆虫都使用三脚架步态,该步态在任何给定时间至少将三条腿保持在地面上。关于这种快速运动策略差异的一个普遍的假设是,三脚架运动可以使昆虫迅速在三维地形上导航。为了测试这一点,我们通过计算发现了以果蝇为基础的模型的快速运动步态。的确,在通过腿部附着力优化快速向上攀爬时,三脚架的步态被排除在许多其他可能的步态之外。相比之下,新颖的两足脚架步态在平坦地形上最快,并且在模型和六脚架机器人中没有附着力。有趣的是,当果蝇的腿部结构被覆盖时,动物表现出非典型的两足动物般的腿协调性。我们建议,攀登垂直地形的要求可能会导致三脚架步态的普及率超过以最小的地面接触而产生的更快的替代步态。
































 京公网安备 11010802027423号
京公网安备 11010802027423号