当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Revisiting the “Stick‐Slip” Process via Magnetism‐Coupled Flexible Sensors with Bioinspired Ridge Architecture
Advanced Materials ( IF 27.4 ) Pub Date : 2025-03-19 , DOI: 10.1002/adma.202417867
Dan Fang 1 , Sen Ding 1 , Yuhan Liu 1 , Qian Zhou 2 , Biao Qi 1 , Bing Ji 3 , Bingpu Zhou 1, 4
Advanced Materials ( IF 27.4 ) Pub Date : 2025-03-19 , DOI: 10.1002/adma.202417867
Dan Fang 1 , Sen Ding 1 , Yuhan Liu 1 , Qian Zhou 2 , Biao Qi 1 , Bing Ji 3 , Bingpu Zhou 1, 4
Affiliation
|
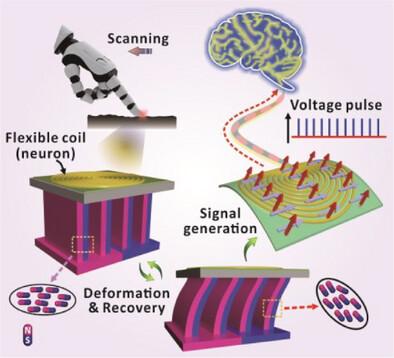
“Stick‐slip” phenomenon that occurs when human fingertip scans across a specific surface is essential to perceive the interactions between skin and the surface. Understanding the “stick‐slip” behavior is important for bionic flexible system in applications from advanced robotics to intelligent tactile sensors. However, it is often overlooked owing to the limitations to mimic the soft skin that can tangentially deform/recover with informative electrical feedback. Here, a sandwich‐type device with deformable ridge‐layer is proposed to analyze the characteristic of stick/slip states in “stick‐slip” process. Specifically, it is observed that fast recovery of the sensing architecture is caused by dynamic slip phase that generates periodical signals based on principle of induction. The results experimentally show that periods of the electrical pulses are dependent on factors such as inherent properties (e.g., modulus and geometry) and operational parameters (e.g., scanning speed and normal load), which is consistent with the theoretical model. Furthermore, it is found that the transition between “stick‐slip” and full slip could qualitatively reflect interfacial properties such as moisture, roughness, and topology. It is expected that the results can strengthen the understanding of “stick‐slip” behavior when fingertip interacts with a surface and provide guidance of flexible sensor design to enrich the biomimetic perceptions.
中文翻译:

通过具有仿生脊架构的磁耦合柔性传感器重新审视“粘滑”过程
当人类指尖扫描特定表面时发生的“粘滑”现象对于感知皮肤和表面之间的相互作用至关重要。了解“粘滑”行为对于从高级机器人技术到智能触觉传感器等应用中的仿生柔性系统非常重要。然而,由于模拟柔软的皮肤的限制,它经常被忽视,而柔软的皮肤可以通过信息丰富的电反馈进行切向变形/恢复。在这里,提出了一种具有可变形脊层的夹层式装置,用于分析 “粘滑” 过程中的粘/滑态特征。具体来说,据观察,传感架构的快速恢复是由动态滑移相位引起的,该动态滑移相位基于感应原理产生周期性信号。实验结果表明,电脉冲的周期取决于固有特性(例如模量和几何形状)和作参数(例如扫描速度和法向负载)等因素,这与理论模型一致。此外,研究发现 “粘滑” 和 完全滑移 之间的转变可以定性地反映界面特性,如水分、粗糙度和拓扑结构。预计结果可以加强对指尖与表面交互时 “粘滑 ”行为的理解,并为灵活的传感器设计提供指导,以丰富仿生感知。
更新日期:2025-03-19
中文翻译:
通过具有仿生脊架构的磁耦合柔性传感器重新审视“粘滑”过程
当人类指尖扫描特定表面时发生的“粘滑”现象对于感知皮肤和表面之间的相互作用至关重要。了解“粘滑”行为对于从高级机器人技术到智能触觉传感器等应用中的仿生柔性系统非常重要。然而,由于模拟柔软的皮肤的限制,它经常被忽视,而柔软的皮肤可以通过信息丰富的电反馈进行切向变形/恢复。在这里,提出了一种具有可变形脊层的夹层式装置,用于分析 “粘滑” 过程中的粘/滑态特征。具体来说,据观察,传感架构的快速恢复是由动态滑移相位引起的,该动态滑移相位基于感应原理产生周期性信号。实验结果表明,电脉冲的周期取决于固有特性(例如模量和几何形状)和作参数(例如扫描速度和法向负载)等因素,这与理论模型一致。此外,研究发现 “粘滑” 和 完全滑移 之间的转变可以定性地反映界面特性,如水分、粗糙度和拓扑结构。预计结果可以加强对指尖与表面交互时 “粘滑 ”行为的理解,并为灵活的传感器设计提供指导,以丰富仿生感知。
































 京公网安备 11010802027423号
京公网安备 11010802027423号