当前位置:
X-MOL 学术
›
Adv. Funct. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Soft‐Hard Magnetic Transformable Coaxial Fiber with Multimodal Deformations
Advanced Functional Materials ( IF 18.5 ) Pub Date : 2024-12-27 , DOI: 10.1002/adfm.202421254 Zhouming Liu, Yuanxi Zhang, Juying Cai, Fuqian Chen, Ke Zhao, Yuanyuan Li, Xi Xie, Shiwei Du, Tiantian Xu, Lelun Jiang
Advanced Functional Materials ( IF 18.5 ) Pub Date : 2024-12-27 , DOI: 10.1002/adfm.202421254 Zhouming Liu, Yuanxi Zhang, Juying Cai, Fuqian Chen, Ke Zhao, Yuanyuan Li, Xi Xie, Shiwei Du, Tiantian Xu, Lelun Jiang
|
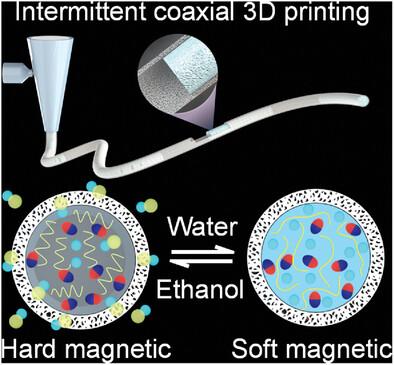
Magnetic soft materials have been extensively utilized in the development of soft robots. However, they usually fail to achieve programmable soft‐hard magnetic transformations, limiting multimodal magnetoactive deformation and locomotion. Herein, a coaxial magnetic fiber (CMF) consisting of a porous polydimethylsiloxane (p‐PDMS) sheath and a core of sodium alginate sol (SAS) mixed with neodymium‐iron‐boron (NdFeB) particles (NdFeB@SAS) is reported, fabricated using intermittent coaxial 3D printing. The CMF can reversibly transition between a hard magnetic state (coercivity H cm 6900 Oe and remanence M r 61 emu g−1 ) and a soft magnetic state (H cm 450 Oe and M r 16 emu g−1 ) through the solvent exchange strategy, achieving a ≈15‐fold change in coercivity and a ≈4‐fold increase in remanence. Three CMF‐based samples are constructed and programmed with varying soft‐hard magnetic profiles, exhibiting multimodal magnetoactive deformation. Moreover, under a fluctuating magnetic field, a bionic butterfly robot can flap its wings over a vertical branch without falling. A magnetic brush is also constructed to paint origami objects using magnetic actuation. These demonstrations underscore that the responsiveness of the CMF to global magnetic fields can be locally tailored, allowing for the coexistence of attraction and repulsion in various regions of the CMF, providing a novel approach for developing soft robots.
中文翻译:

具有多模态变形的软-硬磁可变形同轴光纤
磁性软材料在软体机器人的开发中得到了广泛的应用。然而,它们通常无法实现可编程的软-硬磁变换,从而限制了多模态磁有效变形和运动。在此,报道了一种由多孔聚二甲基硅氧烷 (p-PDMS) 护套和海藻酸钠溶胶 (SAS) 核心与钕铁硼 (NdFeB) 颗粒 (NdFeB@SAS) 混合组成的同轴磁性光纤 (CMF),使用间歇同轴 3D 打印制造。CMF 可以通过溶剂交换策略在硬磁态(矫顽力 Hcm 6900 Oe 和剩磁 Mr 61 emu g−1)和软磁态(Hcm 450 Oe 和 Mr 16 emu g−1)之间可逆地转换,实现矫顽力变化 ≈15 倍,剩磁增加 ≈4 倍。构建了三个基于 CMF 的样品,并使用不同的软硬磁剖面进行编程,表现出多模态磁有效变形。此外,在波动的磁场下,仿生蝴蝶机器人可以在垂直树枝上拍打翅膀而不会掉落。还构造了一个磁刷,以使用磁力驱动来绘制折纸对象。这些演示强调,CMF 对全球磁场的响应性可以局部定制,允许 CMF 各个区域的吸引力和排斥力共存,为开发软机器人提供了一种新的方法。
更新日期:2024-12-27
中文翻译:
具有多模态变形的软-硬磁可变形同轴光纤
磁性软材料在软体机器人的开发中得到了广泛的应用。然而,它们通常无法实现可编程的软-硬磁变换,从而限制了多模态磁有效变形和运动。在此,报道了一种由多孔聚二甲基硅氧烷 (p-PDMS) 护套和海藻酸钠溶胶 (SAS) 核心与钕铁硼 (NdFeB) 颗粒 (NdFeB@SAS) 混合组成的同轴磁性光纤 (CMF),使用间歇同轴 3D 打印制造。CMF 可以通过溶剂交换策略在硬磁态(矫顽力 Hcm 6900 Oe 和剩磁 Mr 61 emu g−1)和软磁态(Hcm 450 Oe 和 Mr 16 emu g−1)之间可逆地转换,实现矫顽力变化 ≈15 倍,剩磁增加 ≈4 倍。构建了三个基于 CMF 的样品,并使用不同的软硬磁剖面进行编程,表现出多模态磁有效变形。此外,在波动的磁场下,仿生蝴蝶机器人可以在垂直树枝上拍打翅膀而不会掉落。还构造了一个磁刷,以使用磁力驱动来绘制折纸对象。这些演示强调,CMF 对全球磁场的响应性可以局部定制,允许 CMF 各个区域的吸引力和排斥力共存,为开发软机器人提供了一种新的方法。
































 京公网安备 11010802027423号
京公网安备 11010802027423号