Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
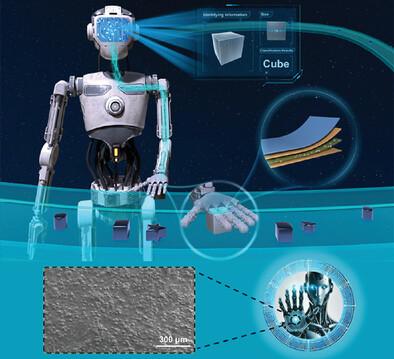
Luminescent Tactile Sensor System for Robots: Enhancing Human–Computer Interaction in Complex Dark Environments
Small ( IF 13.0 ) Pub Date : 2024-12-18 , DOI: 10.1002/smll.202410190 Jiaxin Yin, Zhi Cao, Yuxuan Zhou, Xiaoqing Huo, Zhiyi Wu
Small ( IF 13.0 ) Pub Date : 2024-12-18 , DOI: 10.1002/smll.202410190 Jiaxin Yin, Zhi Cao, Yuxuan Zhou, Xiaoqing Huo, Zhiyi Wu
|
In order to achieve interaction and collaboration with humans, robots need to have the ability for tactile perception of simulating human. Traditional methods use electrically connected sensors with complex arrays, leading to intricate wiring, high manufacturing costs, and demanding current environments. A flexible sensor with simple structure, easy preparation process, and low cost based on triboluminescence effect is proposed in this paper, which avoids the complex array and wiring of traditional sensors. The study discusses the relationship between luminescent intensity and factors such as luminescent particle content, luminescent layer thickness, encapsulation layer thickness, and friction layer thickness. It also analyzes the mechanism of luminescence. A micro charge‐coupled device is configured for the luminescent unit to collect optical information and is integrated with the robot's manipulator for testing. A simple sensing system is constructed to demonstrate environmental perception, acquiring, and feeding back shape and size information of contact objects in the dark. The system successfully identifies and judges target objects in complex dark environments, offering insights for applications such as unmanned assembly lines. It overcomes the challenge of intricate electrical connections, paving new avenues for intelligent object recognition research in human–computer interaction.
中文翻译:

用于机器人的发光触觉传感器系统:在复杂的黑暗环境中增强人机交互
为了实现与人类的交互和协作,机器人需要具备模拟人类的触觉感知能力。传统方法使用具有复杂阵列的电连接传感器,导致布线复杂、制造成本高和苛刻的当前环境。该文基于摩擦发光效应,提出了一种结构简单、制备工艺简单、成本低的柔性传感器,避免了传统传感器复杂的阵列和布线问题。该研究讨论了发光强度与发光颗粒含量、发光层厚度、封装层厚度和摩擦层厚度等因素之间的关系。它还分析了发光的机制。为发光装置配置了一个微型电荷耦合装置以收集光学信息,并与机器人的机械手集成进行测试。构建了一个简单的传感系统,用于演示环境感知、获取和反馈黑暗中接触物体的形状和大小信息。该系统在复杂的黑暗环境中成功识别和判断目标物体,为无人装配线等应用提供见解。它克服了复杂电气连接的挑战,为人机交互中的智能对象识别研究铺平了新的途径。
更新日期:2024-12-18
中文翻译:
用于机器人的发光触觉传感器系统:在复杂的黑暗环境中增强人机交互
为了实现与人类的交互和协作,机器人需要具备模拟人类的触觉感知能力。传统方法使用具有复杂阵列的电连接传感器,导致布线复杂、制造成本高和苛刻的当前环境。该文基于摩擦发光效应,提出了一种结构简单、制备工艺简单、成本低的柔性传感器,避免了传统传感器复杂的阵列和布线问题。该研究讨论了发光强度与发光颗粒含量、发光层厚度、封装层厚度和摩擦层厚度等因素之间的关系。它还分析了发光的机制。为发光装置配置了一个微型电荷耦合装置以收集光学信息,并与机器人的机械手集成进行测试。构建了一个简单的传感系统,用于演示环境感知、获取和反馈黑暗中接触物体的形状和大小信息。该系统在复杂的黑暗环境中成功识别和判断目标物体,为无人装配线等应用提供见解。它克服了复杂电气连接的挑战,为人机交互中的智能对象识别研究铺平了新的途径。





























 京公网安备 11010802027423号
京公网安备 11010802027423号