Nature ( IF 50.5 ) Pub Date : 2024-11-20 , DOI: 10.1038/s41586-024-08202-5 G. Arrick, D. Sticker, A. Ghazal, Y. Lu, T. Duncombe, D. Gwynne, B. Mouridsen, J. Wainer, J. P. H. Jepsen, T. S. Last, D. Schultz, K. Hess, E. Medina De Alba, S. Min, M. Poulsen, C. Anker, P. Karandikar, H. D. Pedersen, J. Collins, N. E. Egecioglu, S. Tamang, C. Cleveland, K. Ishida, A. H. Uhrenfeldt, J. Kuosmanen, M. Pereverzina, A. Hayward, R. K. Kirk, S. You, C. M. Dalsgaard, S. B. Gunnarsson, I. Patsi, A. Bohr, A. Azzarello, M. R. Frederiksen, P. Herskind, J. Li, N. Roxhed, U. L. Rahbek, J. J. Water, S. T. Buckley, G. Traverso
|
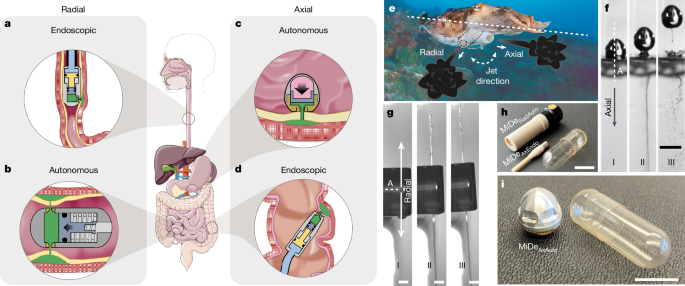
Needle-based injections currently enable the administration of a wide range of biomacromolecule therapies across the body, including the gastrointestinal tract1,2,3, through recent developments in ingestible robotic devices4,5,6,7. However, needles generally require training, sharps management and disposal, and pose challenges for autonomous ingestible systems. Here, inspired by the jetting systems of cephalopods, we have developed and evaluated microjet delivery systems that can deliver jets in axial and radial directions into tissue, making them suitable for tubular and globular segments of the gastrointestinal tract. Furthermore, they are implemented in both tethered and ingestible formats, facilitating endoscopic applications or patient self-dosing. Our study identified suitable pressure and nozzle dimensions for different segments of the gastrointestinal tract and applied microjets in a variety of devices that support delivery across the various anatomic segments of the gastrointestinal tract. We characterized the ability of these systems to administer macromolecules, including insulin, a glucagon-like peptide-1 (GLP1) analogue and a small interfering RNA (siRNA) in large animal models, achieving exposure levels similar to those achieved with subcutaneous delivery. This research provides key insights into jetting design parameters for gastrointestinal administration, substantially broadening the possibilities for future endoscopic and ingestible drug delivery devices.
中文翻译:
用于胃肠道药物输送的头足类动物启发喷射装置
通过可摄入机器人设备的最新发展,基于针头的注射目前能够在全身(包括胃肠道1,2,3)4,5,6,7 中进行广泛的生物大分子疗法。然而,针头通常需要培训、锐器管理和处置,并对自主可摄入系统构成挑战。在这里,受头足类动物喷射系统的启发,我们开发并评估了微射流输送系统,该系统可以在轴向和径向方向上将喷射器输送到组织中,使其适用于胃肠道的管状和球状段。此外,它们以栓系和可摄入的形式实现,便于内窥镜应用或患者自我给药。我们的研究确定了适用于胃肠道不同段的压力和喷嘴尺寸,并将微射流应用于支持跨胃肠道各个解剖段输送的各种设备中。我们在大型动物模型中表征了这些系统施用大分子的能力,包括胰岛素、胰高血糖素样肽-1 (GLP1) 类似物和小干扰 RNA (siRNA),达到与皮下递送相似的暴露水平。这项研究为胃肠道给药的喷射设计参数提供了关键见解,大大拓宽了未来内窥镜和可摄入给药装置的可能性。

















































 京公网安备 11010802027423号
京公网安备 11010802027423号