Nature Materials ( IF 37.2 ) Pub Date : 2024-10-04 , DOI: 10.1038/s41563-024-02026-4 Zixuan Deng, Kai Li, Arri Priimagi, Hao Zeng
|
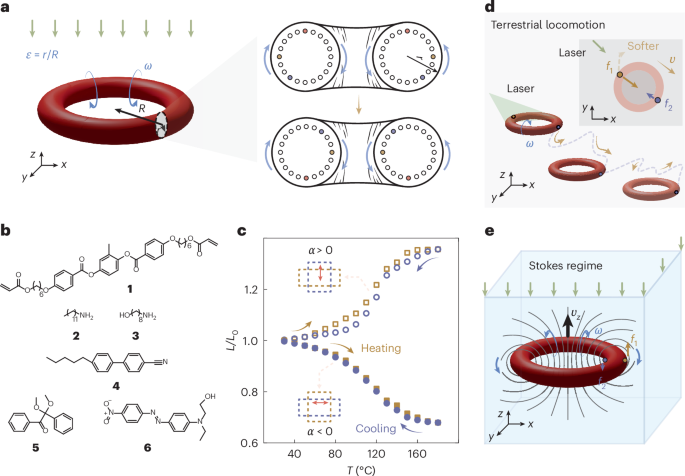
Driving synthetic materials out of equilibrium via dissipative mechanisms paves the way towards autonomous, self-sustained robotic motions. However, obtaining agile movement in diverse environments with dynamic steerability remains a challenge. Here we report a light-fuelled soft liquid crystal elastomer torus with self-sustained out-of-equilibrium movement. Under constant light excitation, the torus undergoes spontaneous rotation arising from the formation of zero-elastic-energy modes. By exploiting dynamic friction or drag, the zero-elastic-energy-mode-based locomotion direction can be optically controlled in various dry and fluid environments. We demonstrate the ability of the liquid crystal elastomer torus to laterally and vertically swim in the Stokes regime. The torus navigation can be extended to three-dimensional space with full steerability of the swimming direction. These results demonstrate the possibilities enabled by prestrained topological structures towards robotic functions of out-of-equilibrium soft matter.
中文翻译:
使用零弹性能量模式的光控运动
通过耗散机制将合成材料从平衡中驱赶出来,为自主、自我维持的机器人运动铺平了道路。然而,在具有动态可操控性的不同环境中实现敏捷运动仍然是一个挑战。在这里,我们报道了一个光燃料软液晶弹性体环面,具有自维持的失衡运动。在恒定的光激发下,由于形成零弹性能模式,圆环会发生自发旋转。通过利用动态摩擦或阻力,可以在各种干燥和流体环境中对基于零弹性能量模式的运动方向进行光学控制。我们展示了液晶弹性体环面在斯托克斯状态下横向和垂直游泳的能力。圆环导航可以扩展到三维空间,并具有游泳方向的完全可控性。这些结果证明了预应变拓扑结构对失衡软物质的机器人功能的可能性。
































 京公网安备 11010802027423号
京公网安备 11010802027423号