Nature ( IF 50.5 ) Pub Date : 2024-10-02 , DOI: 10.1038/s41586-024-07854-7 Neha Sapkal, Nino Mancini, Divya Sthanu Kumar, Nico Spiller, Kazuma Murakami, Gianna Vitelli, Benjamin Bargeron, Kate Maier, Katharina Eichler, Gregory S. X. E. Jefferis, Philip K. Shiu, Gabriella R. Sterne, Salil S. Bidaye
|
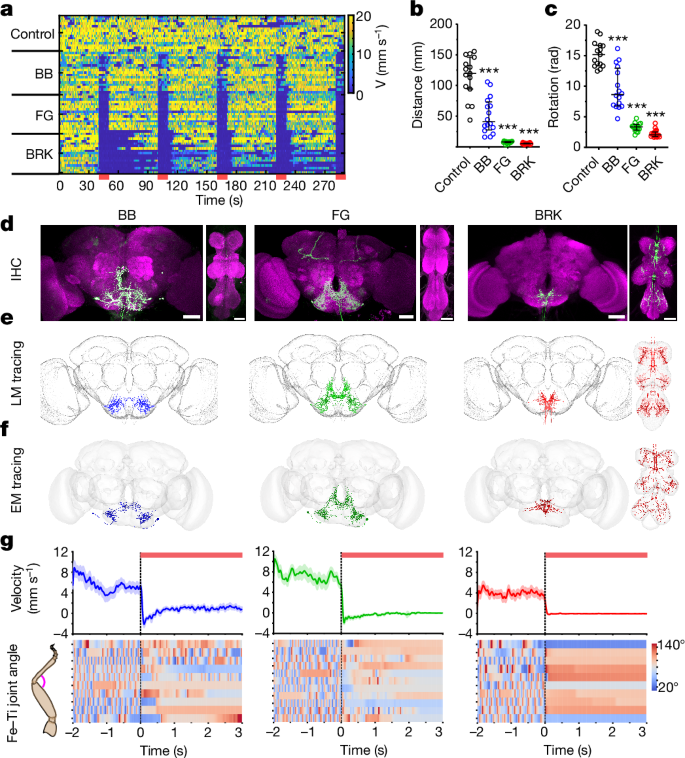
Walking is a complex motor programme involving coordinated and distributed activity across the brain and the spinal cord. Halting appropriately at the correct time is a critical component of walking control. Despite progress in identifying neurons driving halting1,2,3,4,5,6, the underlying neural circuit mechanisms responsible for overruling the competing walking state remain unclear. Here, using connectome-informed models7,8,9 and functional studies, we explain two fundamental mechanisms by which Drosophila implement context-appropriate halting. The first mechanism (‘walk-OFF’) relies on GABAergic neurons that inhibit specific descending walking commands in the brain, whereas the second mechanism (‘brake’) relies on excitatory cholinergic neurons in the nerve cord that lead to an active arrest of stepping movements. We show that two neurons that deploy the walk-OFF mechanism inhibit distinct populations of walking-promotion neurons, leading to differential halting of forward walking or turning. The brake neurons, by constrast, override all walking commands by simultaneously inhibiting descending walking-promotion neurons and increasing the resistance at the leg joints. We characterized two behavioural contexts in which the distinct halting mechanisms were used by the animal in a mutually exclusive manner: the walk-OFF mechanism was engaged for halting during feeding and the brake mechanism was engaged for halting and stability during grooming.
中文翻译:
果蝇特定环境停止的神经回路机制
步行是一种复杂的运动程序,涉及大脑和脊髓的协调和分布活动。在正确的时间适当地停止是步行控制的关键组成部分。尽管在识别驱动停止的神经元方面取得了进展1,2,3,4,5,6 ,但负责推翻竞争步行状态的潜在神经回路机制仍不清楚。在这里,使用连接组信息模型7、8、9和功能研究,我们解释了果蝇实现上下文适当停止的两种基本机制。第一种机制(“走开”)依赖于抑制大脑中特定的下行行走命令的 GABA 能神经元,而第二种机制(“制动”)则依赖于神经索中的兴奋性胆碱能神经元,从而导致主动停止行走动作。我们发现,部署走走机制的两个神经元会抑制不同的步行促进神经元群体,导致向前行走或转身的不同停止。相比之下,制动神经元通过同时抑制下行步行促进神经元并增加腿部关节的阻力来凌驾于所有步行命令之上。我们描述了两种行为环境,其中动物以相互排斥的方式使用不同的停止机制:走开机制用于在喂食期间停止,制动机制用于在梳理过程中停止和保持稳定。






























 京公网安备 11010802027423号
京公网安备 11010802027423号