当前位置:
X-MOL 学术
›
ACS Energy Lett.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Self-Propelled Nanocellulose Aerogel Eco-Robots for Self-Powered Aquatic Environment Perception
ACS Energy Letters ( IF 19.3 ) Pub Date : 2024-09-16 , DOI: 10.1021/acsenergylett.4c01769 Jiwei Zhang, Mengjie Wu, Xinran Zhou, Zechang Ming, Jian Chen, Liming Zhu, Jianyong Yu, Zhong Lin Wang, Jiaqing Xiong
ACS Energy Letters ( IF 19.3 ) Pub Date : 2024-09-16 , DOI: 10.1021/acsenergylett.4c01769 Jiwei Zhang, Mengjie Wu, Xinran Zhou, Zechang Ming, Jian Chen, Liming Zhu, Jianyong Yu, Zhong Lin Wang, Jiaqing Xiong
|
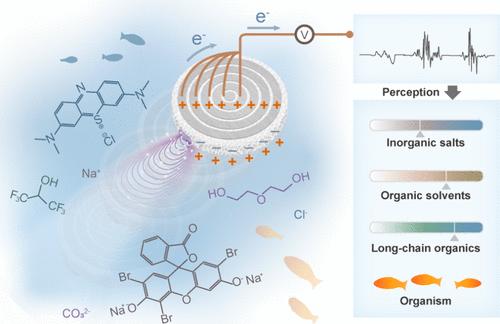
Untethered robots utilizing environmental energy for aquatic information perception are significant for human–robot–environment interactions, which require strategies to reconcile self-powered locomotion and autonomous sensation. Inspired by rove beetles with Marangoni propulsion, we developed a self-propelled nanocellulose aerogel eco-robot with a parallelly patterned electrode array with equal gaps, demonstrating continuous locomotion on water and simultaneous electricity generation via an unreported continuous solid–liquid sliding contact electrification mechanism with sufficient charge transfer. Systematically studying the charge transfer mechanism between the locomotive robot and water surface at different robot geometry, motion status, and diversified water contamination conditions, the self-powered robot achieves locomotion status self-monitoring and water contaminant concentration detection with a high sensitivity of 99.6%. It also demonstrates water–organism interaction including fish motion perception and monitoring. This work proposes a concept for constructing a smart aquatic ecosystem utilizing robots with self-powered mechanical–electrical cooperativity, demonstrating autonomous environmental energy utilization for information acquisition and interaction.
中文翻译:

用于自供电水生环境感知的自驱动纳米纤维素气凝胶生态机器人
利用环境能量进行水生信息感知的不受束缚的机器人对于人-机器人-环境交互具有重要意义,这需要协调自供电运动和自主感觉的策略。受到马兰戈尼推进的行囊甲虫的启发,我们开发了一种自驱动纳米纤维素气凝胶生态机器人,具有等间隙的平行图案电极阵列,通过未报道的连续固液滑动接触起电机制演示了在水上连续运动和同时发电足够的电荷转移。系统研究了不同机器人几何形状、运动状态和多样化水污染条件下机车机器人与水面之间的电荷传递机制,自供电机器人实现了运动状态自我监测和水污染物浓度检测,灵敏度高达99.6% 。它还展示了水与生物的相互作用,包括鱼的运动感知和监测。这项工作提出了利用具有自供电机电协同性的机器人构建智能水生生态系统的概念,展示了自主环境能源利用的信息获取和交互。
更新日期:2024-09-16
中文翻译:
用于自供电水生环境感知的自驱动纳米纤维素气凝胶生态机器人
利用环境能量进行水生信息感知的不受束缚的机器人对于人-机器人-环境交互具有重要意义,这需要协调自供电运动和自主感觉的策略。受到马兰戈尼推进的行囊甲虫的启发,我们开发了一种自驱动纳米纤维素气凝胶生态机器人,具有等间隙的平行图案电极阵列,通过未报道的连续固液滑动接触起电机制演示了在水上连续运动和同时发电足够的电荷转移。系统研究了不同机器人几何形状、运动状态和多样化水污染条件下机车机器人与水面之间的电荷传递机制,自供电机器人实现了运动状态自我监测和水污染物浓度检测,灵敏度高达99.6% 。它还展示了水与生物的相互作用,包括鱼的运动感知和监测。这项工作提出了利用具有自供电机电协同性的机器人构建智能水生生态系统的概念,展示了自主环境能源利用的信息获取和交互。






























 京公网安备 11010802027423号
京公网安备 11010802027423号