当前位置:
X-MOL 学术
›
J. Mater. Sci. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Programming ferromagnetic soft materials for miniature soft robots: Design, fabrication, and applications
Journal of Materials Science & Technology ( IF 11.2 ) Pub Date : 2024-09-14 , DOI: 10.1016/j.jmst.2024.08.049 Junliang Chen , Dongdong Jin , Qianqian Wang , Xing Ma
Journal of Materials Science & Technology ( IF 11.2 ) Pub Date : 2024-09-14 , DOI: 10.1016/j.jmst.2024.08.049 Junliang Chen , Dongdong Jin , Qianqian Wang , Xing Ma
|
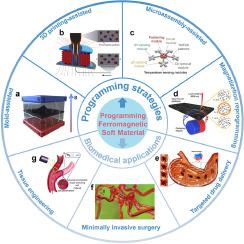
Due to the small size, active mobility, and intrinsic softness, miniature soft robots hold promising potentials in reaching the deep region inside living bodies otherwise inaccessible with compelling agility, adaptability and safety. Various materials and actuation strategies have been developed for creating soft robots, among which, ferromagnetic soft materials that self-actuate in response to external magnetic fields have attracted worldwide attention due to their remote controllability and excellent compatibility with biological tissues. This review presents comprehensive and systematic research advancements in the design, fabrication, and applications of ferromagnetic soft materials for miniature robots, providing insights into their potential use in biomedical fields and beyond. The programming strategies of ferromagnetic soft materials are summarized and classified, including mold-assisted programming, 3D printing-assisted programming, microassembly-assisted programming, and magnetization reprogramming. Each approach possesses unique advantages in manipulating the magnetic responsiveness of ferromagnetic soft materials to achieve outstanding actuation and deformation performances. We then discuss the biomedical applications of ferromagnetic soft material-based soft robots (e.g., minimally invasive surgery, targeted delivery, and tissue engineering), highlighting their potentials in revolutionizing biomedical technologies. This review also points out the current challenges and provides insights into future research directions, which we hope can serve as a useful reference for the development of next-generation adaptive miniature robots.
中文翻译:

用于微型软体机器人的铁磁软材料编程:设计、制造和应用
由于体积小、主动移动性和内在的柔软性,微型软机器人在到达生物体内的深处区域方面具有广阔的潜力,否则无法以令人信服的敏捷性、适应性和安全性进入。已经开发了各种材料和驱动策略来制造软机器人,其中响应外部磁场而自动驱动的铁磁软材料因其远程控制性和与生物组织的出色相容性而引起了全世界的关注。本文综述了用于微型机器人的铁磁软材料的设计、制造和应用方面全面、系统的研究进展,为它们在生物医学领域及其他领域的潜在应用提供了见解。对铁磁软材料的编程策略进行了总结和分类,包括模具辅助编程、3D 打印辅助编程、微装配辅助编程和磁化重编程。每种方法在操纵铁磁软材料的磁响应性方面都具有独特的优势,以实现出色的驱动和变形性能。然后,我们讨论了基于铁磁软材料的软机器人的生物医学应用(例如,微创手术、靶向输送和组织工程),强调了它们在彻底改变生物医学技术方面的潜力。本文还指出了当前面临的挑战,并对未来的研究方向提供了见解,希望能为下一代自适应微型机器人的发展提供有用的参考。
更新日期:2024-09-14
中文翻译:
用于微型软体机器人的铁磁软材料编程:设计、制造和应用
由于体积小、主动移动性和内在的柔软性,微型软机器人在到达生物体内的深处区域方面具有广阔的潜力,否则无法以令人信服的敏捷性、适应性和安全性进入。已经开发了各种材料和驱动策略来制造软机器人,其中响应外部磁场而自动驱动的铁磁软材料因其远程控制性和与生物组织的出色相容性而引起了全世界的关注。本文综述了用于微型机器人的铁磁软材料的设计、制造和应用方面全面、系统的研究进展,为它们在生物医学领域及其他领域的潜在应用提供了见解。对铁磁软材料的编程策略进行了总结和分类,包括模具辅助编程、3D 打印辅助编程、微装配辅助编程和磁化重编程。每种方法在操纵铁磁软材料的磁响应性方面都具有独特的优势,以实现出色的驱动和变形性能。然后,我们讨论了基于铁磁软材料的软机器人的生物医学应用(例如,微创手术、靶向输送和组织工程),强调了它们在彻底改变生物医学技术方面的潜力。本文还指出了当前面临的挑战,并对未来的研究方向提供了见解,希望能为下一代自适应微型机器人的发展提供有用的参考。






























 京公网安备 11010802027423号
京公网安备 11010802027423号