Nature Communications ( IF 14.7 ) Pub Date : 2024-09-10 , DOI: 10.1038/s41467-024-52347-w Minho Seong 1 , Kahyun Sun 1 , Somi Kim 1 , Hyukjoo Kwon 1 , Sang-Woo Lee 1 , Sarath Chandra Veerla 1 , Dong Kwan Kang 1 , Jaeil Kim 1 , Stalin Kondaveeti 1, 2 , Salah M Tawfik 1, 3 , Hyung Wook Park 1 , Hoon Eui Jeong 1
|
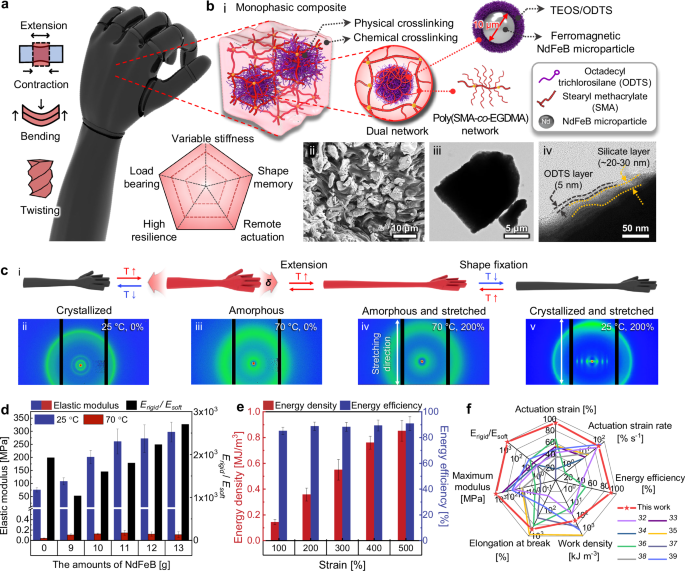
Despite recent advancements, artificial muscles have not yet been able to strike the right balance between exceptional mechanical properties and dexterous actuation abilities that are found in biological systems. Here, we present an artificial magnetic muscle that exhibits multiple remarkable mechanical properties and demonstrates comprehensive actuating performance, surpassing those of biological muscles. This artificial muscle utilizes a composite configuration, integrating a phase-change polymer and ferromagnetic particles, enabling active control over mechanical properties and complex actuating motions through remote laser heating and magnetic field manipulation. Consequently, the magnetic composite muscle can dynamically adjust its stiffness as needed, achieving a switching ratio exceeding 2.7 × 10³. This remarkable adaptability facilitates substantial load-bearing capacity, with specific load capacities of up to 1000 and 3690 for tensile and compressive stresses, respectively. Moreover, it demonstrates reversible extension, contraction, bending, and twisting, with stretchability exceeding 800%. We leverage these distinctive attributes to showcase the versatility of this composite muscle as a soft continuum robotic manipulator. It adeptly executes various programmable responses and performs complex tasks while minimizing mechanical vibrations. Furthermore, we demonstrate that this composite muscle excels across multiple mechanical and actuation aspects compared to existing actuators.
中文翻译:
用于软机器人的多功能磁肌肉
尽管最近取得了进展,但人造肌肉尚未能够在生物系统中发现的卓越机械性能和灵巧致动能力之间取得适当的平衡。在这里,我们提出了一种人造磁性肌肉,它表现出多种卓越的机械性能,并表现出超越生物肌肉的综合致动性能。这种人造肌肉采用复合结构,集成了相变聚合物和铁磁颗粒,能够通过远程激光加热和磁场操纵来主动控制机械性能和复杂的致动运动。因此,磁性复合肌肉可以根据需要动态调整其刚度,实现超过2.7×10³的切换比。这种卓越的适应性有助于实现巨大的承载能力,拉伸应力和压缩应力的比载荷能力分别高达 1000 和 3690。此外,它还表现出可逆的伸展、收缩、弯曲和扭曲,拉伸率超过800%。我们利用这些独特的属性来展示这种复合肌肉作为软连续机器人操纵器的多功能性。它熟练地执行各种可编程响应并执行复杂的任务,同时最大限度地减少机械振动。此外,我们证明,与现有的执行器相比,这种复合肌肉在多个机械和驱动方面都表现出色。






























 京公网安备 11010802027423号
京公网安备 11010802027423号