Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Magnetic Torque-Driven All-Terrain Microrobots
Small ( IF 13.0 ) Pub Date : 2024-09-10 , DOI: 10.1002/smll.202405501 Qiong Wang 1 , Zhuhua Zhang 1 , Yuhua Wu 1 , Bingyan Li 1 , Yuchong Li 2 , Hongcheng Gu 1 , Zhongze Gu 1
Small ( IF 13.0 ) Pub Date : 2024-09-10 , DOI: 10.1002/smll.202405501 Qiong Wang 1 , Zhuhua Zhang 1 , Yuhua Wu 1 , Bingyan Li 1 , Yuchong Li 2 , Hongcheng Gu 1 , Zhongze Gu 1
Affiliation
|
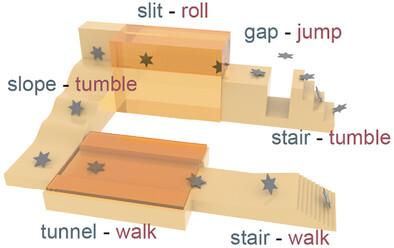
All-terrain microrobots possess significant potential in modern medical applications due to their superior maneuverability in complex terrains and confined spaces. However, conventional microrobots often struggle with adaptability and operational difficulties in variable environments. This study introduces a magnetic torque-driven all-terrain multiped microrobot (MTMR) to address these challenges. By coupling the structure's multiple symmetries with different uniform magnetic fields, such as rotating and oscillating fields, the MTMR demonstrates various locomotion modes, including rolling, tumbling, walking, jumping, and their combinations. Experimental results indicate that the robot can navigate diverse terrains, including flat surfaces, steep slopes (up to 75°), and gaps over twice its body height. Additionally, the MTMR performs well in confined spaces, capable of passing through slits (0.1 body length) and low tunnels (0.25 body length). The robot shows potential for clinical applications like minimally invasive hemostasis in internal bleeding and thrombus removal from blood vessels through accurate cargo manipulation capability. Moreover, the MTMR can carry temperature sensors to monitor environmental temperature changes in real time while simultaneously manipulating objects, displaying its potential for in-situ sensing and parallel task implementation. This all-terrain microrobot technology demonstrates notable adaptability and versatility, providing a solid foundation for practical applications in interventional medicine.
中文翻译:

磁扭矩驱动的全地形微型机器人
全地形微型机器人因其在复杂地形和狭窄空间内的卓越机动性而在现代医疗应用中具有巨大潜力。然而,传统的微型机器人在多变的环境中往往难以适应和操作困难。本研究介绍了一种磁扭矩驱动的全地形多用途微型机器人 (MTMR) 来应对这些挑战。通过将结构的多个对称性与不同的均匀磁场(例如旋转场和振荡场)耦合,MTMR 演示了各种运动模式,包括滚动、翻滚、行走、跳跃及其组合。实验结果表明,该机器人可以在各种地形中导航,包括平坦的表面、陡峭的斜坡(高达 75°)和超过其身体高度两倍的间隙。此外,MTMR 在狭窄空间内表现良好,能够穿过狭缝(0.1 体长)和低隧道(0.25 体长)。该机器人显示出临床应用的潜力,例如通过精确的货物操作能力从内出血中进行微创止血和从血管中清除血栓。此外,MTMR 可以携带温度传感器,实时监测环境温度变化,同时操纵物体,展示其在原位传感和并行任务实施方面的潜力。这种全地形微型机器人技术表现出显著的适应性和多功能性,为介入医学的实际应用奠定了坚实的基础。
更新日期:2024-09-10
中文翻译:
磁扭矩驱动的全地形微型机器人
全地形微型机器人因其在复杂地形和狭窄空间内的卓越机动性而在现代医疗应用中具有巨大潜力。然而,传统的微型机器人在多变的环境中往往难以适应和操作困难。本研究介绍了一种磁扭矩驱动的全地形多用途微型机器人 (MTMR) 来应对这些挑战。通过将结构的多个对称性与不同的均匀磁场(例如旋转场和振荡场)耦合,MTMR 演示了各种运动模式,包括滚动、翻滚、行走、跳跃及其组合。实验结果表明,该机器人可以在各种地形中导航,包括平坦的表面、陡峭的斜坡(高达 75°)和超过其身体高度两倍的间隙。此外,MTMR 在狭窄空间内表现良好,能够穿过狭缝(0.1 体长)和低隧道(0.25 体长)。该机器人显示出临床应用的潜力,例如通过精确的货物操作能力从内出血中进行微创止血和从血管中清除血栓。此外,MTMR 可以携带温度传感器,实时监测环境温度变化,同时操纵物体,展示其在原位传感和并行任务实施方面的潜力。这种全地形微型机器人技术表现出显著的适应性和多功能性,为介入医学的实际应用奠定了坚实的基础。
































 京公网安备 11010802027423号
京公网安备 11010802027423号