Light: Science & Applications ( IF 20.6 ) Pub Date : 2024-09-05 , DOI: 10.1038/s41377-024-01609-9 Zhexuan Cao 1, 2, 3 , Ning Li 1, 2, 3 , Laiyu Zhu 1, 2, 3 , Jiamin Wu 1, 2, 3 , Qionghai Dai 1, 2, 3 , Hui Qiao 1, 2, 3
|
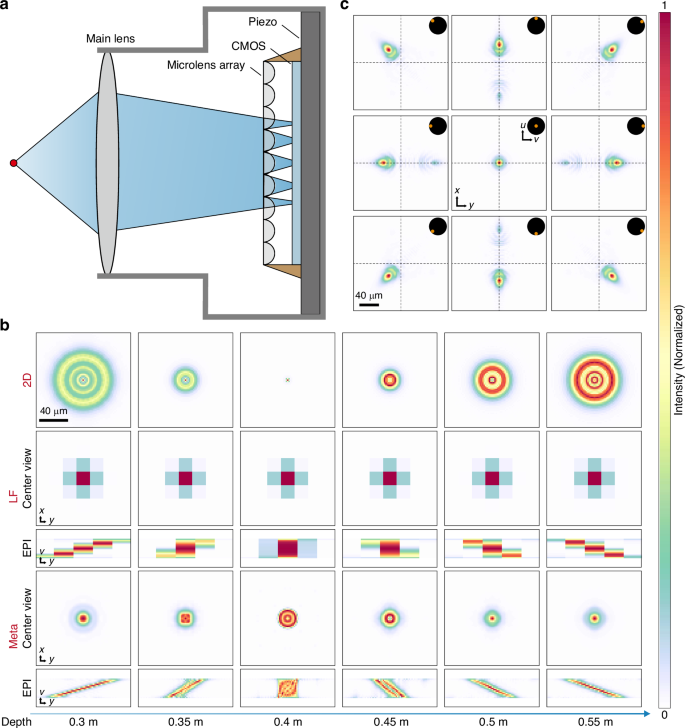
Depth sensing plays a crucial role in various applications, including robotics, augmented reality, and autonomous driving. Monocular passive depth sensing techniques have come into their own for the cost-effectiveness and compact design, offering an alternative to the expensive and bulky active depth sensors and stereo vision systems. While the light-field camera can address the defocus ambiguity inherent in 2D cameras and achieve unambiguous depth perception, it compromises the spatial resolution and usually struggles with the effect of optical aberration. In contrast, our previously proposed meta-imaging sensor1 has overcome such hurdles by reconciling the spatial-angular resolution trade-off and achieving the multi-site aberration correction for high-resolution imaging. Here, we present a compact meta-imaging camera and an analytical framework for the quantification of monocular depth sensing precision by calculating the Cramér–Rao lower bound of depth estimation. Quantitative evaluations reveal that the meta-imaging camera exhibits not only higher precision over a broader depth range than the light-field camera but also superior robustness against changes in signal-background ratio. Moreover, both the simulation and experimental results demonstrate that the meta-imaging camera maintains the capability of providing precise depth information even in the presence of aberrations. Showing the promising compatibility with other point-spread-function engineering methods, we anticipate that the meta-imaging camera may facilitate the advancement of monocular passive depth sensing in various applications.
中文翻译:
使用元成像相机的像差鲁棒单目被动深度传感
深度传感在机器人、增强现实和自动驾驶等各种应用中发挥着至关重要的作用。单目被动深度传感技术因其成本效益和紧凑设计而大放异彩,为昂贵且笨重的主动深度传感器和立体视觉系统提供了替代方案。虽然光场相机可以解决 2D 相机固有的散焦模糊性并实现明确的深度感知,但它会损害空间分辨率,并且通常会受到光学像差的影响。相比之下,我们之前提出的元成像传感器1通过协调空间角分辨率权衡并实现高分辨率成像的多位像差校正来克服这些障碍。在这里,我们提出了一种紧凑型元成像相机和一个分析框架,用于通过计算深度估计的 Cramér-Rao 下限来量化单眼深度传感精度。定量评估表明,元成像相机不仅在更广泛的深度范围内比光场相机表现出更高的精度,而且对信号背景比变化具有出色的鲁棒性。此外,模拟和实验结果都表明,即使存在像差,元成像相机也能保持提供精确深度信息的能力。显示出与其他点扩散函数工程方法的良好兼容性,我们预计元成像相机可能会促进单目被动深度传感在各种应用中的进步。
































 京公网安备 11010802027423号
京公网安备 11010802027423号