Nature Communications ( IF 14.7 ) Pub Date : 2024-07-26 , DOI: 10.1038/s41467-024-50497-5 Yanbin Li 1 , Antonio Di Lallo 1 , Junxi Zhu 1 , Yinding Chi 1 , Hao Su 1, 2, 3 , Jie Yin 1
|
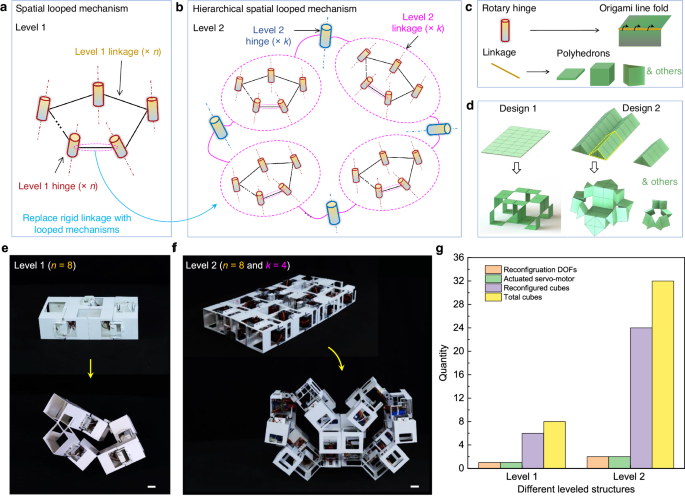
Shape-morphing capabilities are crucial for enabling multifunctionality in both biological and artificial systems. Various strategies for shape morphing have been proposed for applications in metamaterials and robotics. However, few of these approaches have achieved the ability to seamlessly transform into a multitude of volumetric shapes post-fabrication using a relatively simple actuation and control mechanism. Taking inspiration from thick origami and hierarchies in nature, we present a hierarchical construction method based on polyhedrons to create an extensive library of compact origami metastructures. We show that a single hierarchical origami structure can autonomously adapt to over 103 versatile architectural configurations, achieved with the utilization of fewer than 3 actuation degrees of freedom and employing simple transition kinematics. We uncover the fundamental principles governing theses shape transformation through theoretical models. Furthermore, we also demonstrate the wide-ranging potential applications of these transformable hierarchical structures. These include their uses as untethered and autonomous robotic transformers capable of various gait-shifting and multidirectional locomotion, as well as rapidly self-deployable and self-reconfigurable architecture, exemplifying its scalability up to the meter scale. Lastly, we introduce the concept of multitask reconfigurable and deployable space robots and habitats, showcasing the adaptability and versatility of these metastructures.
中文翻译:
基于自适应分层折纸的元结构
形状变形能力对于实现生物和人工系统的多功能性至关重要。已经针对超材料和机器人技术的应用提出了各种形状变形策略。然而,这些方法中很少有能够使用相对简单的致动和控制机制在制造后无缝地转变为多种体积形状。从自然界厚重的折纸和层次结构中汲取灵感,我们提出了一种基于多面体的层次结构方法,以创建一个广泛的紧凑折纸元结构库。我们证明,单个分层折纸结构可以自主适应超过 10 3 种多功能建筑配置,这是通过利用少于 3 个驱动自由度并采用简单的过渡运动学来实现的。我们通过理论模型揭示了控制这些形状变换的基本原理。此外,我们还展示了这些可转换层次结构的广泛潜在应用。这些包括它们作为不受束缚的自主机器人变压器的用途,能够进行各种步态转换和多向运动,以及快速自我部署和自我重新配置的架构,例证了其可扩展至米级。最后,我们介绍了多任务可重构和可部署空间机器人和栖息地的概念,展示了这些元结构的适应性和多功能性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号