Nature Materials ( IF 37.2 ) Pub Date : 2024-07-23 , DOI: 10.1038/s41563-024-01955-4 Xin Wang 1 , Chengfeng Pan 2 , Neng Xia 1 , Chong Zhang 1 , Bo Hao 1 , Dongdong Jin 3 , Lin Su 1 , Jinsheng Zhao 1 , Carmel Majidi 4 , Li Zhang 1, 5, 6, 7, 8
|
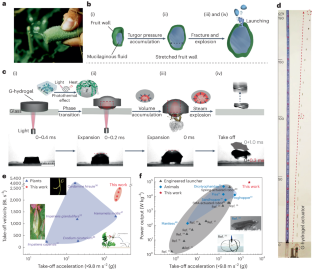
Robotic tasks that require robust propulsion abilities such as jumping, ejecting or catapulting require power-amplification strategies where kinetic energy is generated from pre-stored energy. Here we report an engineered accumulated strain energy-fracture power-amplification method that is inspired by the pressurized fluidic squirting mechanism of Ecballium elaterium (squirting cucumber plants). We realize a light-driven hydrogel launcher that harnesses fast liquid vapourization triggered by the photothermal response of an embedded graphene suspension. This vapourization leads to appreciable elastic energy storage within the surrounding hydrogel network, followed by rapid elastic energy release within 0.3 ms. These soft hydrogel robots achieve controlled launching at high velocity with a predictable trajectory. The accumulated strain energy-fracture method was used to create an artificial squirting cucumber that disperses artificial seeds over metres, which can further achieve smart seeding through an integrated radio-frequency identification chip. This power-amplification strategy provides a basis for propulsive motion to advance the capabilities of miniaturized soft robotic systems.
中文翻译:
水凝胶发射器中的裂缝驱动功率放大
需要强大推进能力的机器人任务(如跳跃、弹射或弹射)需要功率放大策略,其中动能由预先储存的能量产生。在这里,我们报告了一种工程化的累积应变能-断裂-放大方法,该方法的灵感来自 Ecballium elaterium(喷出黄瓜植物)的加压流体喷射机制。我们实现了一种光驱动的水凝胶发射器,它利用了由嵌入式石墨烯悬浮液的光热响应触发的快速液体蒸汽化。这种汽化导致周围水凝胶网络内产生明显的弹性能量储存,然后在 0.3 毫秒内快速释放弹性能量。这些软水凝胶机器人以可预测的轨迹实现高速受控发射。采用累积应变能断裂法制造人工喷出黄瓜,将人工种子分散数米,透过集成射频识别芯片,进一步实现智能播种。这种功率放大策略为推进运动提供了基础,以推进小型化软机器人系统的能力。
















































 京公网安备 11010802027423号
京公网安备 11010802027423号