npj Flexible Electronics ( IF 12.3 ) Pub Date : 2024-07-18 , DOI: 10.1038/s41528-024-00325-z Hao Hu , Chengqian Zhang , Xinyi Lai , Huangzhe Dai , Chengfeng Pan , Haonan Sun , Daofan Tang , Zhezai Hu , Jianzhong Fu , Tiefeng Li , Peng Zhao
|
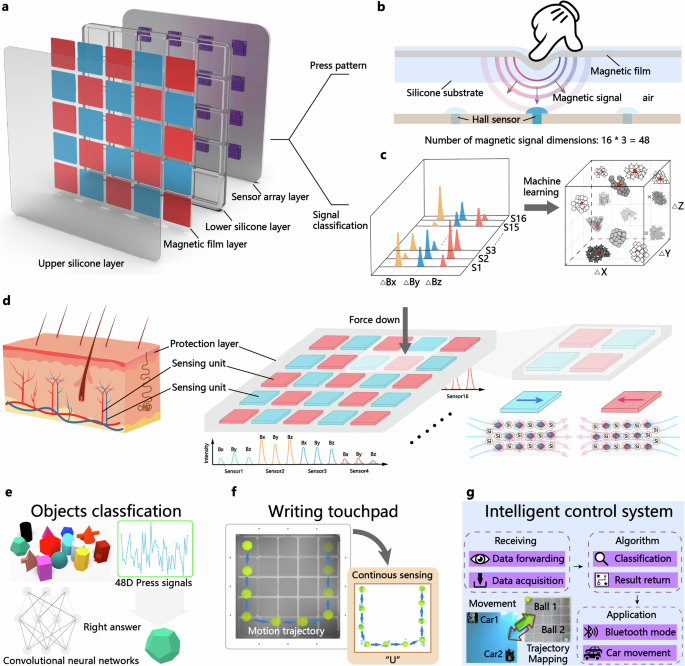
The advancements in tactile sensor technology have found wide-ranging applications in robotic fields, resulting in remarkable achievements in object manipulation and overall human-machine interactions. However, the widespread availability of high-resolution tactile skins remains limited, due to the challenges of incorporating large-sized, robust sensing units and increased wiring complexity. One approach to achieve high-resolution and robust tactile skins is to integrate a limited number of sensor units (taxels) into a flexible surface material and leverage signal processing techniques to achieve super-resolution sensing. Here, we present a magnetic skin consisting of multi-direction magnetized flexible films and a contactless Hall sensor array. The key features of the proposed sensor include the specific magnetization arrangement, K-Nearest Neighbors (KNN) clustering algorithm and convolutional neural network (CNN) model for signal processing. Using only an array of 4*4 taxels, our magnetic skin is capable of achieving super-resolution perception over an area of 48400 mm2, with an average localization error of 1.2 mm. By employing neural network algorithms to decouple the multi-dimensional signals, the skin can achieve multi-point and multi-scale perception. We also demonstrate the promising potentials of the proposed sensor in intelligent control, by simultaneously controlling two vehicles with trajectory mapping on the magnetic skin.
中文翻译:
大面积磁性皮肤,用于具有超分辨率的多点和多尺度触觉传感
触觉传感器技术的进步在机器人领域得到了广泛的应用,在物体操纵和整体人机交互方面取得了显着的成就。然而,由于整合大尺寸、坚固的传感单元和增加布线复杂性的挑战,高分辨率触觉皮肤的广泛应用仍然受到限制。实现高分辨率和鲁棒触觉皮肤的一种方法是将有限数量的传感器单元(紫杉醇)集成到柔性表面材料中,并利用信号处理技术来实现超分辨率传感。在这里,我们提出了一种由多方向磁化柔性薄膜和非接触式霍尔传感器阵列组成的磁性皮肤。该传感器的主要特点包括特定的磁化排列、K 最近邻 (KNN) 聚类算法和用于信号处理的卷积神经网络 (CNN) 模型。仅使用4*4紫杉醇阵列,我们的磁性皮肤就能够在48400 mm 2的区域内实现超分辨率感知,平均定位误差为1.2 mm。通过采用神经网络算法对多维信号进行解耦,皮肤可以实现多点、多尺度的感知。我们还通过在磁性皮肤上绘制轨迹图同时控制两辆车辆,展示了所提出的传感器在智能控制方面的巨大潜力。





























 京公网安备 11010802027423号
京公网安备 11010802027423号