当前位置:
X-MOL 学术
›
Nano Energy
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Dual-mode temperature sensor based on ferroelectric Bi0.5Na0.5TiO3 materials for robotic tactile perception
Nano Energy ( IF 16.8 ) Pub Date : 2024-07-09 , DOI: 10.1016/j.nanoen.2024.109982 Yun Ji , Shengjie Yin , Yuan Liu , Chris R. Bowen , Ya Yang
Nano Energy ( IF 16.8 ) Pub Date : 2024-07-09 , DOI: 10.1016/j.nanoen.2024.109982 Yun Ji , Shengjie Yin , Yuan Liu , Chris R. Bowen , Ya Yang
|
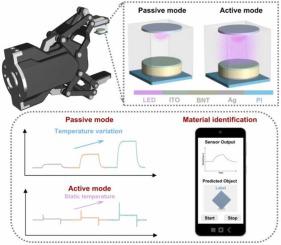
Temperature perception can allow robots to acquire rich information regarding their surroundings to improve the accuracy of both object manipulation and object recognition. However, existing robotic temperature perception systems mainly depend on thermoresistive effect, suffering from singular functionality and high energy consumption. Here, we demonstrate a ferroelectric Bi0.5 Na0.5 TiO3 -based dual-mode temperature sensor for robotic temperature perception. The dual-mode temperature sensor can operate in a passive mode to perceive temperature variations by generating pyroelectric signals, and work in an active mode to detect static temperatures by producing pyro-photoelectric signals. Equipped with the dual-mode temperature sensor, a robot hand can perceive multi-dimensional temperature information and assess the thermal conductivity of materials, allowing identification of different materials in real-time with a high accuracy of 97.2 %. By combining passive and active temperature perception, the proposed dual-mode temperature sensor therefore holds significant potential for future robotic perception and manipulation.
中文翻译:

基于铁电 Bi0.5Na0.5TiO3 材料的双模温度传感器用于机器人触觉感知
温度感知可以让机器人获取有关周围环境的丰富信息,从而提高物体操作和物体识别的准确性。然而,现有的机器人温度感知系统主要依赖于热阻效应,具有功能单一和高能耗等问题。在这里,我们展示了一种基于铁电 Bi0.5Na0.5TiO3 的双模温度传感器,用于机器人温度感知。双模温度传感器可以在无源模式下工作,通过产生热释电信号来感知温度变化,并在有源模式下工作,通过产生热释电-光电信号来检测静态温度。配备双模式温度传感器,机械手可以感知多维温度信息并评估材料的热导率,从而可以实时识别不同的材料,准确率高达 97.2%。通过结合被动和主动温度感知,所提出的双模式温度传感器因此具有未来机器人感知和操纵的巨大潜力。
更新日期:2024-07-09
中文翻译:
基于铁电 Bi0.5Na0.5TiO3 材料的双模温度传感器用于机器人触觉感知
温度感知可以让机器人获取有关周围环境的丰富信息,从而提高物体操作和物体识别的准确性。然而,现有的机器人温度感知系统主要依赖于热阻效应,具有功能单一和高能耗等问题。在这里,我们展示了一种基于铁电 Bi0.5Na0.5TiO3 的双模温度传感器,用于机器人温度感知。双模温度传感器可以在无源模式下工作,通过产生热释电信号来感知温度变化,并在有源模式下工作,通过产生热释电-光电信号来检测静态温度。配备双模式温度传感器,机械手可以感知多维温度信息并评估材料的热导率,从而可以实时识别不同的材料,准确率高达 97.2%。通过结合被动和主动温度感知,所提出的双模式温度传感器因此具有未来机器人感知和操纵的巨大潜力。
































 京公网安备 11010802027423号
京公网安备 11010802027423号