npj Digital Medicine ( IF 12.4 ) Pub Date : 2024-07-06 , DOI: 10.1038/s41746-024-01178-6 Zonghe Xu 1, 2 , Lin Zhou 2 , Bin Han 1 , Shuang Wu 3 , Yanjun Xiao 2 , Sihui Zhang 1 , Jiang Chen 1 , Jianbin Guo 2 , Dong Wu 2, 4
|
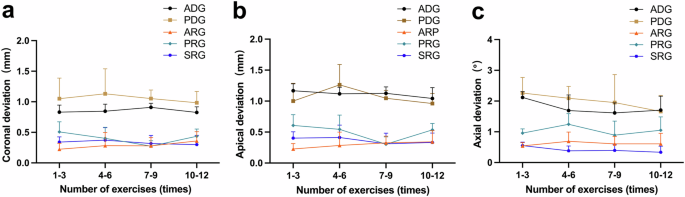
Computer-aided implant surgery has undergone continuous development in recent years. In this study, active and passive systems of dynamic navigation were divided into active dynamic navigation system group and passive dynamic navigation system group (ADG and PDG), respectively. Active, passive and semi-active implant robots were divided into active robot group, passive robot group and semi-active robot group (ARG, PRG and SRG), respectively. Each group placed two implants (FDI tooth positions 31 and 36) in a model 12 times. The accuracy of 216 implants in 108 models were analysed. The coronal deviations of ADG, PDG, ARG, PRG and SRG were 0.85 ± 0.17 mm, 1.05 ± 0.42 mm, 0.29 ± 0.15 mm, 0.40 ± 0.16 mm and 0.33 ± 0.14 mm, respectively. The apical deviations of the five groups were 1.11 ± 0.23 mm, 1.07 ± 0.38 mm, 0.29 ± 0.15 mm, 0.50 ± 0.19 mm and 0.36 ± 0.16 mm, respectively. The axial deviations of the five groups were 1.78 ± 0.73°, 1.99 ± 1.20°, 0.61 ± 0.25°, 1.04 ± 0.37° and 0.42 ± 0.18°, respectively. The coronal, apical and axial deviations of ADG were higher than those of ARG, PRG and SRG (all P < 0.001). Similarly, the coronal, apical and axial deviations of PDG were higher than those of ARG, PRG, and SRG (all P < 0.001). Dynamic and robotic computer-aided implant surgery may show good implant accuracy in vitro. However, the accuracy and stability of implant robots are higher than those of dynamic navigation systems.
中文翻译:
使用不同的动态导航和机器人系统进行牙种植体植入的准确性:一项体外研究
近年来计算机辅助种植手术不断发展。本研究将主动和被动动态导航系统分别分为主动动态导航系统组和被动动态导航系统组(ADG和PDG)。主动、被动和半主动植入机器人分别分为主动机器人组、被动机器人组和半主动机器人组(ARG、PRG和SRG)。每组在模型中放置两颗种植体(FDI 牙位 31 和 36)12 次。对 108 个模型中 216 个种植体的准确性进行了分析。 ADG、PDG、ARG、PRG和SRG的冠状位偏差分别为0.85±0.17mm、1.05±0.42mm、0.29±0.15mm、0.40±0.16mm和0.33±0.14mm。五组根尖偏差分别为1.11±0.23mm、1.07±0.38mm、0.29±0.15mm、0.50±0.19mm和0.36±0.16mm。五组的轴向偏差分别为1.78±0.73°、1.99±1.20°、0.61±0.25°、1.04±0.37°和0.42±0.18°。 ADG的冠状面、心尖部和轴向偏差均高于ARG、PRG和SRG(均P < 0.001)。同样,PDG 的冠状面、心尖部和轴向偏差均高于 ARG、PRG 和 SRG(均P < 0.001)。动态和机器人计算机辅助种植手术可能在体外表现出良好的种植精度。然而,植入机器人的精度和稳定性高于动态导航系统。















































 京公网安备 11010802027423号
京公网安备 11010802027423号