当前位置:
X-MOL 学术
›
Chem. Eng. J.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
A rationally designed polymer brush/lubricant coating system for effective static and dynamic marine antifouling
Chemical Engineering Journal ( IF 13.3 ) Pub Date : 2024-06-28 , DOI: 10.1016/j.cej.2024.153568 Baoxin Wang , Hongxing Ye , Baiyi Chen , Pengjiao Zu , Guizhen Lu , Li Ma , Haibing Zhang , Mingxian Sun , Yuanjie Li , Hongyi Liu , Jianhua Wu
Chemical Engineering Journal ( IF 13.3 ) Pub Date : 2024-06-28 , DOI: 10.1016/j.cej.2024.153568 Baoxin Wang , Hongxing Ye , Baiyi Chen , Pengjiao Zu , Guizhen Lu , Li Ma , Haibing Zhang , Mingxian Sun , Yuanjie Li , Hongyi Liu , Jianhua Wu
|
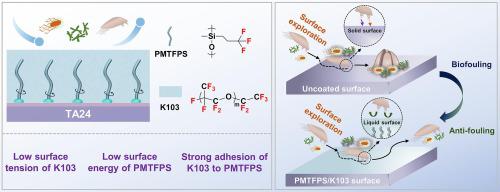
Bioinspired slippery surfaces have garnered significant attention as promising solutions to mitigate biofouling. Unlike traditional lubricant-infused porous surfaces, recent research has focused on the integration of lubricants within polymer brush-grafted surfaces. The combination of polydimethylsiloxane (PDMS) polymer brush and silicone oil has gradually become the most prevalent choice due to their outstanding chemical affinity. However, this conventional coating system also has the potential for improvement to meet the needs of long-lasting and efficient marine antifouling, including i) precisely designing the polymer brush’s chemical structure to match the polarity of a specific lubricant enhances their chemical affinity, and ii) appropriately reduce the coating system’s surface energy to improve the fouling desorption performance. Here, we introduce a systematically engineered polymer brush/lubricant coating system that incorporates fluorinated polysiloxane and perfluoropolyether fluid. This novel coating system exhibits enhanced adhesion strength coupled with reduced surface energy, resulting in superior stability and omniphobic properties. Additionally, it showcases excellent corrosion resistance and significantly deters marine microorganism adhesion, achieving reductions of 98.8 % for and 99.8 % for . Marine field trials, conducted over a 90-day static immersion period, confirm the remarkable antifouling performance, which surpasses most existing slippery coatings. Moreover, under dynamic conditions, organisms adhering for 150 days are readily dislodged by shear force. These findings underscore the pivotal role of systematic design in polymer brush/lubricant coating systems for the advancement of high-performance slippery surfaces tailored for marine antifouling applications.
中文翻译:

合理设计的聚合物刷/润滑剂涂层系统,可有效实现静态和动态海洋防污
仿生光滑表面作为减轻生物污垢的有前途的解决方案引起了广泛关注。与传统的润滑剂注入多孔表面不同,最近的研究重点是将润滑剂整合到聚合物刷接枝表面中。聚二甲基硅氧烷(PDMS)聚合物刷和硅油的组合由于其出色的化学亲和力逐渐成为最普遍的选择。然而,这种传统的涂层系统也有改进的潜力,以满足持久和高效的海洋防污的需求,包括i)精确设计聚合物刷的化学结构以匹配特定润滑剂的极性,增强其化学亲和力,以及ii )适当降低涂层体系的表面能,以提高污垢解吸性能。在这里,我们介绍了一种系统设计的聚合物刷/润滑剂涂层系统,其中包含氟化聚硅氧烷和全氟聚醚流体。这种新颖的涂层系统表现出增强的粘合强度和降低的表面能,从而具有卓越的稳定性和憎水特性。此外,它还具有出色的耐腐蚀性,可显着阻止海洋微生物粘附,分别实现 98.8% 和 99.8% 的减少。经过 90 天静态浸泡期的海洋现场试验证实了其卓越的防污性能,超越了大多数现有的光滑涂料。此外,在动态条件下,粘附 150 天的生物体很容易被剪切力驱除。 这些发现强调了聚合物刷/润滑剂涂层系统中的系统设计对于发展专为海洋防污应用定制的高性能光滑表面的关键作用。
更新日期:2024-06-28
中文翻译:
合理设计的聚合物刷/润滑剂涂层系统,可有效实现静态和动态海洋防污
仿生光滑表面作为减轻生物污垢的有前途的解决方案引起了广泛关注。与传统的润滑剂注入多孔表面不同,最近的研究重点是将润滑剂整合到聚合物刷接枝表面中。聚二甲基硅氧烷(PDMS)聚合物刷和硅油的组合由于其出色的化学亲和力逐渐成为最普遍的选择。然而,这种传统的涂层系统也有改进的潜力,以满足持久和高效的海洋防污的需求,包括i)精确设计聚合物刷的化学结构以匹配特定润滑剂的极性,增强其化学亲和力,以及ii )适当降低涂层体系的表面能,以提高污垢解吸性能。在这里,我们介绍了一种系统设计的聚合物刷/润滑剂涂层系统,其中包含氟化聚硅氧烷和全氟聚醚流体。这种新颖的涂层系统表现出增强的粘合强度和降低的表面能,从而具有卓越的稳定性和憎水特性。此外,它还具有出色的耐腐蚀性,可显着阻止海洋微生物粘附,分别实现 98.8% 和 99.8% 的减少。经过 90 天静态浸泡期的海洋现场试验证实了其卓越的防污性能,超越了大多数现有的光滑涂料。此外,在动态条件下,粘附 150 天的生物体很容易被剪切力驱除。 这些发现强调了聚合物刷/润滑剂涂层系统中的系统设计对于发展专为海洋防污应用定制的高性能光滑表面的关键作用。





































 京公网安备 11010802027423号
京公网安备 11010802027423号