Nature Medicine ( IF 58.7 ) Pub Date : 2024-07-01 , DOI: 10.1038/s41591-024-02994-9 Hyungeun Song , Tsung-Han Hsieh , Seong Ho Yeon , Tony Shu , Michael Nawrot , Christian F. Landis , Gabriel N. Friedman , Erica A. Israel , Samantha Gutierrez-Arango , Matthew J. Carty , Lisa E. Freed , Hugh M. Herr
|
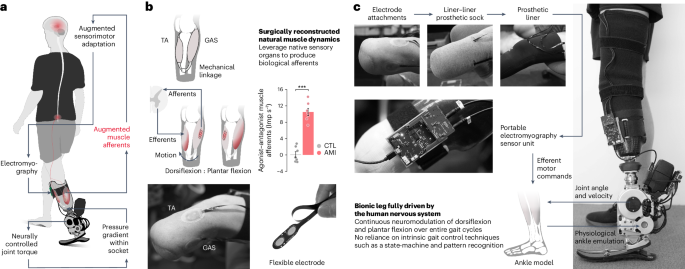
For centuries scientists and technologists have sought artificial leg replacements that fully capture the versatility of their intact biological counterparts. However, biological gait requires coordinated volitional and reflexive motor control by complex afferent and efferent neural interplay, making its neuroprosthetic emulation challenging after limb amputation. Here we hypothesize that continuous neural control of a bionic limb can restore biomimetic gait after below-knee amputation when residual muscle afferents are augmented. To test this hypothesis, we present a neuroprosthetic interface consisting of surgically connected, agonist–antagonist muscles including muscle-sensing electrodes. In a cohort of seven leg amputees, the interface is shown to augment residual muscle afferents by 18% of biologically intact values. Compared with a matched amputee cohort without the afferent augmentation, the maximum neuroprosthetic walking speed is increased by 41%, enabling equivalent peak speeds to persons without leg amputation. Further, this level of afferent augmentation enables biomimetic adaptation to various walking speeds and real-world environments, including slopes, stairs and obstructed pathways. Our results suggest that even a small augmentation of residual muscle afferents restores biomimetic gait under continuous neuromodulation in individuals with leg amputation.
中文翻译:
仿生肢体的连续神经控制可恢复截肢后的仿生步态
几个世纪以来,科学家和技术人员一直在寻找能够充分发挥完整生物腿的多功能性的人工腿替代品。然而,生物步态需要通过复杂的传入和传出神经相互作用来协调意志和反射运动控制,这使得其神经假体模拟在肢体截肢后具有挑战性。在这里,我们假设当残余肌肉传入增强时,仿生肢体的连续神经控制可以在膝下截肢后恢复仿生步态。为了检验这一假设,我们提出了一种神经假体接口,该接口由通过手术连接的主动-拮抗肌肉(包括肌肉感应电极)组成。在由 7 名腿部截肢者组成的队列中,该界面显示出将残余肌肉传入信号增强了生物学完好值的 18%。与没有传入增强的匹配截肢者队列相比,最大神经假体行走速度提高了 41%,与没有腿部截肢的人达到了相同的峰值速度。此外,这种水平的传入增强能够仿生适应各种步行速度和现实世界环境,包括斜坡、楼梯和障碍路径。我们的结果表明,即使是残余肌肉传入的小幅增加也可以在连续神经调节下恢复腿部截肢个体的仿生步态。










































 京公网安备 11010802027423号
京公网安备 11010802027423号