当前位置:
X-MOL 学术
›
Int. J. Mech. Sci.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Novel compliant mechanism-based auxetic metamaterial: Kinematic and experimental analysis
International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2024-06-21 , DOI: 10.1016/j.ijmecsci.2024.109478 Oscar Ochoa , Mariajosé Betancourt-Tovar , A. Sofía Espinosa-Curiel , Alejandro Castro-Avilés , Noé Granados , Enrique Cuan-Urquizo
International Journal of Mechanical Sciences ( IF 7.1 ) Pub Date : 2024-06-21 , DOI: 10.1016/j.ijmecsci.2024.109478 Oscar Ochoa , Mariajosé Betancourt-Tovar , A. Sofía Espinosa-Curiel , Alejandro Castro-Avilés , Noé Granados , Enrique Cuan-Urquizo
|
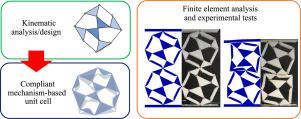
The parametric study of mechanical metamaterials enables the design of structures and components with tailor-made properties. Novel topologies are designed through innovative strategies, such as the kinematic characteristics of linkages and mechanisms. Here, the kinematic analysis of a 10-link, 1-DOF mechanism led to the design of a novel auxetic metamaterial based on its compliant version. Finite element models and laboratory experimentation on additively manufactured samples were conducted to characterize the Poisson’s ratio of these novel kinematically designed metamaterials. By modifying parameters and unit cell arrangements, various magnitudes of auxeticity were observed, demonstrating the tunability of the topology. The findings presented here highlight the design possibilities of novel metamaterials with tailor-made responses, as well as the potential of converging compliant mechanisms and mechanical metamaterials.
中文翻译:

基于新型顺应机制的拉胀超材料:运动学和实验分析
机械超材料的参数化研究使得能够设计具有定制特性的结构和部件。新颖的拓扑是通过创新策略设计的,例如连杆和机构的运动学特征。在这里,对 10 连杆、1 自由度机构的运动学分析导致了基于其顺应版本的新型拉胀超材料的设计。对增材制造样品进行有限元模型和实验室实验,以表征这些新型运动学设计的超材料的泊松比。通过修改参数和晶胞排列,观察到不同程度的拉胀性,证明了拓扑的可调性。这里提出的研究结果强调了具有定制响应的新型超材料的设计可能性,以及融合顺从机制和机械超材料的潜力。
更新日期:2024-06-21
中文翻译:
基于新型顺应机制的拉胀超材料:运动学和实验分析
机械超材料的参数化研究使得能够设计具有定制特性的结构和部件。新颖的拓扑是通过创新策略设计的,例如连杆和机构的运动学特征。在这里,对 10 连杆、1 自由度机构的运动学分析导致了基于其顺应版本的新型拉胀超材料的设计。对增材制造样品进行有限元模型和实验室实验,以表征这些新型运动学设计的超材料的泊松比。通过修改参数和晶胞排列,观察到不同程度的拉胀性,证明了拓扑的可调性。这里提出的研究结果强调了具有定制响应的新型超材料的设计可能性,以及融合顺从机制和机械超材料的潜力。











































 京公网安备 11010802027423号
京公网安备 11010802027423号