当前位置:
X-MOL 学术
›
Process Saf. Environ. Prot.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Real-time concentration detection of Al dust using GRU-based Kalman filtering approach
Process Safety and Environmental Protection ( IF 6.9 ) Pub Date : 2024-06-14 , DOI: 10.1016/j.psep.2024.06.052 Fengyu Zhao , Wei Gao , Jianxin Lu , Haipeng Jiang , Jihao Shi
Process Safety and Environmental Protection ( IF 6.9 ) Pub Date : 2024-06-14 , DOI: 10.1016/j.psep.2024.06.052 Fengyu Zhao , Wei Gao , Jianxin Lu , Haipeng Jiang , Jihao Shi
|
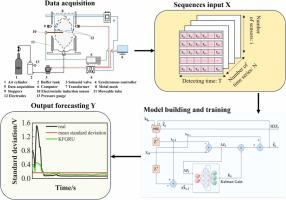
Kalman filter algorithms have been widely used in dust environment concentration detection systems. However, in industrial environments, methods such as KF and median filtering usually require about 10 s of detection time, which cannot meet the requirements of online real-time detection. For this reason, this present study proposes a framework that combines a gated recirculation unit (GRU) with the KF method to achieve online real-time detection of dust concentration. In this framework, the GRU is mainly responsible for handling dynamic and nonlinear characteristics and capturing instantaneous concentration trends. On the other hand, the Kalman filter utilizes its superior state estimation capability to provide more accurate system state estimation by fusing real-time predictions from GRU and sensor measurements. The results show that the KFGRU method is superior to the conventional linear filtering method with a response time of less than 2 s and can detect dust concentration online in real-time. In terms of prediction accuracy, the deviation value of the curve processed by the KFGRU method is only 0.334, which is a significant breakthrough compared with the Kalman filter algorithm 0.755, the sliding average method 0.843, and the median filter method 0.849 (the smaller the deviation value, the higher the prediction accuracy). This study provides a comprehensive and innovative approach for dust concentration monitoring in dust reduction and explosion suppression systems, which not only meets the real-time requirement but also makes important progress in explosion safety management. This will provide more reliable and advanced technical support for dust control and safety in industrial production processes.
中文翻译:

使用基于 GRU 的卡尔曼滤波方法实时检测铝尘浓度
卡尔曼滤波算法已广泛应用于粉尘环境浓度检测系统中。但在工业环境中,KF、中值滤波等方法通常需要10s左右的检测时间,无法满足在线实时检测的要求。为此,本研究提出了一种将门控再循环单元(GRU)与KF方法相结合的框架,以实现粉尘浓度的在线实时检测。在此框架中,GRU 主要负责处理动态和非线性特性并捕获瞬时浓度趋势。另一方面,卡尔曼滤波器利用其卓越的状态估计能力,通过融合 GRU 和传感器测量的实时预测来提供更准确的系统状态估计。结果表明,KFGRU方法优于传统的线性滤波方法,响应时间小于2s,可以实时在线检测粉尘浓度。在预测精度方面,KFGRU方法处理后的曲线偏差值仅为0.334,相比卡尔曼滤波算法0.755、滑动平均法0.843、中值滤波法0.849(较小者)有显着突破。偏差值越大,预测精度越高)。该研究为降尘抑爆系统中粉尘浓度监测提供了一种全面、创新的方法,不仅满足了实时性要求,而且在爆炸安全管理方面取得了重要进展。这将为工业生产过程中的粉尘治理和安全提供更加可靠、先进的技术支撑。
更新日期:2024-06-14
中文翻译:
使用基于 GRU 的卡尔曼滤波方法实时检测铝尘浓度
卡尔曼滤波算法已广泛应用于粉尘环境浓度检测系统中。但在工业环境中,KF、中值滤波等方法通常需要10s左右的检测时间,无法满足在线实时检测的要求。为此,本研究提出了一种将门控再循环单元(GRU)与KF方法相结合的框架,以实现粉尘浓度的在线实时检测。在此框架中,GRU 主要负责处理动态和非线性特性并捕获瞬时浓度趋势。另一方面,卡尔曼滤波器利用其卓越的状态估计能力,通过融合 GRU 和传感器测量的实时预测来提供更准确的系统状态估计。结果表明,KFGRU方法优于传统的线性滤波方法,响应时间小于2s,可以实时在线检测粉尘浓度。在预测精度方面,KFGRU方法处理后的曲线偏差值仅为0.334,相比卡尔曼滤波算法0.755、滑动平均法0.843、中值滤波法0.849(较小者)有显着突破。偏差值越大,预测精度越高)。该研究为降尘抑爆系统中粉尘浓度监测提供了一种全面、创新的方法,不仅满足了实时性要求,而且在爆炸安全管理方面取得了重要进展。这将为工业生产过程中的粉尘治理和安全提供更加可靠、先进的技术支撑。















































 京公网安备 11010802027423号
京公网安备 11010802027423号