当前位置:
X-MOL 学术
›
Pest Manag. Sci.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Design and experimental evaluation of a variable pesticide application control system for the air‐assisted rubber tree powder sprayer
Pest Management Science ( IF 3.8 ) Pub Date : 2024-06-27 , DOI: 10.1002/ps.8246 Yong Wang 1 , Huiming Zhang 1 , Meng Fu 1 , Wei Fu 1, 2 , Juan Wang 1, 2 , Bin Zhang 1, 2 , Yuxing Fu 1, 2 , Tiwei Zeng 1, 2
Pest Management Science ( IF 3.8 ) Pub Date : 2024-06-27 , DOI: 10.1002/ps.8246 Yong Wang 1 , Huiming Zhang 1 , Meng Fu 1 , Wei Fu 1, 2 , Juan Wang 1, 2 , Bin Zhang 1, 2 , Yuxing Fu 1, 2 , Tiwei Zeng 1, 2
Affiliation
|
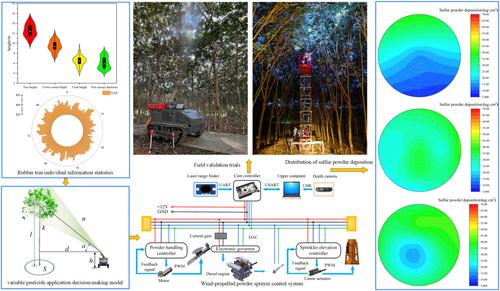
BACKGROUNDIn order to address the issues of uneven pesticide deposition and low pesticide utilization in rubber gardens caused by the traditional diffuse plant protection spraying method, this study focuses on the air‐assisted powder sprayer and proposes a variable pesticide application control system. A variable pesticide application decision‐making model integrating the leaf area index (LAI) was designed based on powdery mildew control standards and individual rubber tree information. According to the target powder spraying accuracy requirements, a control model of the air velocity adjustment device was established and a fuzzy proportional‐integral‐differential (PID) air velocity control system was developed.RESULTSThe simulation results indicate that the wind speed control system exhibits a maximum overshoot of 2.18% and an average response time of 1.48 s. The field experiment conducted in a rubber plantation revealed that when the air‐assisted powder sprayer operates in the variable powder spraying mode, the average response time of the control system is 2.5 s. The control accuracy of each executive mechanism exceeded 95.9%. The deposition coefficient of variation (CV) at different canopy heights was relatively consistent, with values of 35.38%, 36.26% and 36.90%. In comparison to the quantitative mode, the variable mode showed a significant 20.03% increase in the effective utilization rate of sulfur powder.CONCLUSIONThese research findings provide valuable technical support for the advancement of mechanized variable powder spraying equipment in rubber tree cultivation. © 2024 Society of Chemical Industry.
中文翻译:

气助橡胶树喷粉机可变施药控制系统设计与试验评价
背景针对传统扩散植保喷施方式造成的橡胶园农药沉积不均匀、农药利用率低的问题,本研究以空气助粉喷雾机为研究对象,提出了一种可变施药控制系统。基于白粉病防治标准和橡胶树个体信息,设计了集成叶面积指数(LAI)的可变施药决策模型。根据目标喷粉精度要求,建立了风速调节装置的控制模型,开发了模糊比例积分微分(PID)风速控制系统。最大超调量为 2.18%,平均响应时间为 1.48 秒。在橡胶园进行的田间试验表明,空气助粉机在可变喷粉模式下工作时,控制系统的平均响应时间为2.5 s。各执行机构控制精度超过95.9%。不同冠层高度沉积变异系数(CV)较为一致,分别为35.38%、36.26%和36.90%。与定量模式相比,变量模式硫磺粉的有效利用率显着提高了20.03%。结论本研究成果为橡胶树栽培机械化变量喷粉装备的进步提供了有价值的技术支撑。 © 2024 化学工业协会。
更新日期:2024-06-27
中文翻译:
气助橡胶树喷粉机可变施药控制系统设计与试验评价
背景针对传统扩散植保喷施方式造成的橡胶园农药沉积不均匀、农药利用率低的问题,本研究以空气助粉喷雾机为研究对象,提出了一种可变施药控制系统。基于白粉病防治标准和橡胶树个体信息,设计了集成叶面积指数(LAI)的可变施药决策模型。根据目标喷粉精度要求,建立了风速调节装置的控制模型,开发了模糊比例积分微分(PID)风速控制系统。最大超调量为 2.18%,平均响应时间为 1.48 秒。在橡胶园进行的田间试验表明,空气助粉机在可变喷粉模式下工作时,控制系统的平均响应时间为2.5 s。各执行机构控制精度超过95.9%。不同冠层高度沉积变异系数(CV)较为一致,分别为35.38%、36.26%和36.90%。与定量模式相比,变量模式硫磺粉的有效利用率显着提高了20.03%。结论本研究成果为橡胶树栽培机械化变量喷粉装备的进步提供了有价值的技术支撑。 © 2024 化学工业协会。










































 京公网安备 11010802027423号
京公网安备 11010802027423号