当前位置:
X-MOL 学术
›
Adv. Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
任意构建多功能近红外驱动微型机器人
Advanced Materials ( IF 27.4 ) Pub Date : 2024-06-21 , DOI: 10.1002/adma.202402482
Wanyuan Li 1, 2 , Baiyao Liu 1, 2 , Leyan Ou 1, 2 , Gangzhou Li 1, 2 , Dapeng Lei 1, 2 , Ze Xiong 3 , Huihua Xu 1, 2 , Jizhuang Wang 1, 2 , Jinyao Tang 4 , Dan Li 1, 2
Affiliation
|
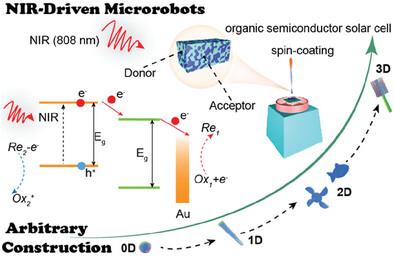
新兴的光驱动微/纳米机器人(LMNR)展示了复杂操作和各种应用的巨大潜力。然而,实现通用且简单的制造技术仍然是一个具有挑战性的追求。本研究介绍了一种基于本体异质结有机半导体太阳能电池(OSC)的创新旋涂方法,旨在促进LMNR的任意构建。利用近红外 (NIR) 响应有机半导体异质结解决方案的独特特性,该技术能够在各种维度结构(0D、1D、2D、3D)上进行均匀涂层,成为 LMNR,称为“机动化”。该薄膜具有细长的厚度约140 nm的轮廓,有效地保留了物体的原始形态,同时赋予了超过其自身重量数百倍的驱动能力。这些微型机器人的推进运动是通过近红外驱动的光电化学反应诱导的自扩散电泳实现的,展示了一系列多功能的可控运动曲线。任意微型机器人结构的战略定制可满足特定应用的需求,从诱导活晶体形成的 0D 微型机器人到专为微塑料提取、货物运输和光定向精确操纵等任务而设计的复杂多维结构。这项研究推进了用户友好且多功能的 LMNR 技术,为各种应用释放了新的可能性,标志着多功能微/纳米机器人技术的变革时代的到来。
"点击查看英文标题和摘要"

































 京公网安备 11010802027423号
京公网安备 11010802027423号