当前位置:
X-MOL 学术
›
Autom. Constr.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
4D point cloud-based spatial-temporal semantic registration for monitoring mobile crane construction activities
Automation in Construction ( IF 9.6 ) Pub Date : 2024-06-21 , DOI: 10.1016/j.autcon.2024.105576 Dong Liang , Sou-Han Chen , Zhe Chen , Yijie Wu , Louis Y.L. Chu , Fan Xue
Automation in Construction ( IF 9.6 ) Pub Date : 2024-06-21 , DOI: 10.1016/j.autcon.2024.105576 Dong Liang , Sou-Han Chen , Zhe Chen , Yijie Wu , Louis Y.L. Chu , Fan Xue
|
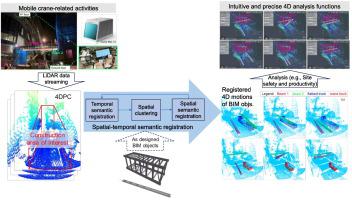
Existing construction activity-monitoring technologies, such as CCTV cameras and IoT devices, have limitations, such as lack of depth information, 3D measurement errors, or wireless signal vulnerability. The limitations are particularly problematic for activities related to mobile cranes due to their high mobility and flexibility. This paper presents a 4D point cloud (4DPC)based spatial-temporal semantic registration method to overcome the limitations. The proposed method integrates spatial-temporal semantic registration into process site 4DPC with as-designed BIM semantics. Results from a one-hour on-site experiment demonstrated that the proposed method achieved 99.93–100% accuracy in detecting BIM objects, and high resolution (centimeter-second granularity) of the trajectories of hoisting activities. This paper offers a two-fold contribution. First, spatial-temporal semantic registration represents an innovative approach to 4D point cloud (4DPC) processing. Secondly, the hoisting activities are comprehensively analyzed based on semantic registration, which can improve safety and productivity monitoring for smarter construction in the future.
中文翻译:

基于 4D 点云的时空语义注册,用于监控移动式起重机施工活动
现有的施工活动监控技术(例如闭路电视摄像机和物联网设备)存在局限性,例如缺乏深度信息、3D 测量误差或无线信号脆弱性。由于移动式起重机的高机动性和灵活性,这些限制对于与移动式起重机相关的活动来说尤其成问题。本文提出了一种基于4D点云(4DPC)的时空语义配准方法来克服这些限制。所提出的方法将时空语义注册与设计的 BIM 语义集成到过程现场 4DPC 中。一小时的现场实验结果表明,该方法在检测 BIM 物体方面实现了 99.93%–100% 的准确率,并且实现了吊装活动轨迹的高分辨率(厘米秒级)。本文提供了双重贡献。首先,时空语义配准代表了 4D 点云 (4DPC) 处理的创新方法。其次,基于语义注册对吊装活动进行全面分析,可以提高安全性和生产率监控,实现未来更加智能的施工。
更新日期:2024-06-21
中文翻译:
基于 4D 点云的时空语义注册,用于监控移动式起重机施工活动
现有的施工活动监控技术(例如闭路电视摄像机和物联网设备)存在局限性,例如缺乏深度信息、3D 测量误差或无线信号脆弱性。由于移动式起重机的高机动性和灵活性,这些限制对于与移动式起重机相关的活动来说尤其成问题。本文提出了一种基于4D点云(4DPC)的时空语义配准方法来克服这些限制。所提出的方法将时空语义注册与设计的 BIM 语义集成到过程现场 4DPC 中。一小时的现场实验结果表明,该方法在检测 BIM 物体方面实现了 99.93%–100% 的准确率,并且实现了吊装活动轨迹的高分辨率(厘米秒级)。本文提供了双重贡献。首先,时空语义配准代表了 4D 点云 (4DPC) 处理的创新方法。其次,基于语义注册对吊装活动进行全面分析,可以提高安全性和生产率监控,实现未来更加智能的施工。





































 京公网安备 11010802027423号
京公网安备 11010802027423号