当前位置:
X-MOL 学术
›
J. Mater. Chem. B
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Magnetic-actuated hydrogel microrobots with multimodal motion and collective behavior
Journal of Materials Chemistry B ( IF 6.1 ) Pub Date : 2024-06-21 , DOI: 10.1039/d4tb00520a
Xi Chen 1 , Chenyao Tian 1 , Hao Zhang 1 , Hui Xie 1
Journal of Materials Chemistry B ( IF 6.1 ) Pub Date : 2024-06-21 , DOI: 10.1039/d4tb00520a
Xi Chen 1 , Chenyao Tian 1 , Hao Zhang 1 , Hui Xie 1
Affiliation
|
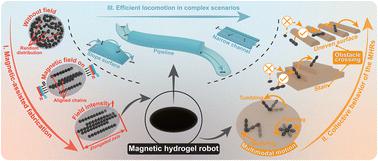
Magnetic-actuated miniature robots have sparked growing interest owing to their promising potential in biomedical applications, such as noninvasive diagnosis, cargo delivery, and microsurgery. Innovations are required to combine biodegradable materials with flexible mobility to promote the translation of magnetic robots towards in vivo application. This study proposes a biodegradable magnetic hydrogel robot (MHR) with multimodal locomotion and collective behavior through magnetic-assisted fabrication. The MHRs with aligned magnetic chains inside their structures have more significant maximum motion speeds under rotating magnetic fields than the robots without magnetic alignment. By reconfiguring the external magnetic fields, three types of stable motion modes (tumbling, spinning, and wobbling modes) of the individual MHRs can be triggered, while flexible conversion can be achieved between each motion mode. The motion mechanism of each motion mode under diverse rotating magnetic fields has been analyzed. The collective behavior of the MHRs, which is triggered by the magnetic dipole force, can enhance the motion performance and pass through sophisticated terrains. Furthermore, the experimental results demonstrate that the assembled MHRs can execute complicated tasks such as targeted cargo delivery. The proposed MHRs with multimodal locomotion and assembled behavior show effective motion efficiency, flexible maneuverability, and remarkable targeting ability, providing a new choice for magnetic robots in biomedical applications.
中文翻译:

具有多模态运动和集体行为的磁驱动水凝胶微型机器人
磁驱动微型机器人因其在生物医学应用(例如无创诊断、货物运输和显微外科)方面的巨大潜力而引起了越来越多的兴趣。需要创新将可生物降解材料与灵活的移动性相结合,以促进磁性机器人向体内应用的转化。本研究提出了一种可生物降解的磁性水凝胶机器人(MHR),通过磁辅助制造具有多模式运动和集体行为。结构内部具有对齐磁链的 MHR 在旋转磁场下比没有磁对齐的机器人具有更显着的最大运动速度。通过重新配置外部磁场,可以触发各个MHR的三种稳定运动模式(翻滚、旋转和摆动模式),同时可以在每种运动模式之间实现灵活的转换。分析了不同旋转磁场下每种运动模式的运动机理。由磁偶极力触发的 MHR 的集体行为可以增强运动性能并穿过复杂的地形。此外,实验结果表明,组装的 MHR 可以执行复杂的任务,例如定向货物运输。所提出的具有多模态运动和组装行为的MHR表现出有效的运动效率、灵活的机动性和卓越的靶向能力,为生物医学应用中的磁性机器人提供了新的选择。
更新日期:2024-06-21
中文翻译:
具有多模态运动和集体行为的磁驱动水凝胶微型机器人
磁驱动微型机器人因其在生物医学应用(例如无创诊断、货物运输和显微外科)方面的巨大潜力而引起了越来越多的兴趣。需要创新将可生物降解材料与灵活的移动性相结合,以促进磁性机器人向体内应用的转化。本研究提出了一种可生物降解的磁性水凝胶机器人(MHR),通过磁辅助制造具有多模式运动和集体行为。结构内部具有对齐磁链的 MHR 在旋转磁场下比没有磁对齐的机器人具有更显着的最大运动速度。通过重新配置外部磁场,可以触发各个MHR的三种稳定运动模式(翻滚、旋转和摆动模式),同时可以在每种运动模式之间实现灵活的转换。分析了不同旋转磁场下每种运动模式的运动机理。由磁偶极力触发的 MHR 的集体行为可以增强运动性能并穿过复杂的地形。此外,实验结果表明,组装的 MHR 可以执行复杂的任务,例如定向货物运输。所提出的具有多模态运动和组装行为的MHR表现出有效的运动效率、灵活的机动性和卓越的靶向能力,为生物医学应用中的磁性机器人提供了新的选择。
































 京公网安备 11010802027423号
京公网安备 11010802027423号