当前位置:
X-MOL 学术
›
Eng. Anal. Bound. Elem.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
Topology optimization of multi-dimensional force sensor elastomers based on kinematic properties of parallel mechanism
Engineering Analysis With Boundary Elements ( IF 4.2 ) Pub Date : 2024-06-04 , DOI: 10.1016/j.enganabound.2024.105820 Dachang Zhu , Yonglong He , Fangyi Li
Engineering Analysis With Boundary Elements ( IF 4.2 ) Pub Date : 2024-06-04 , DOI: 10.1016/j.enganabound.2024.105820 Dachang Zhu , Yonglong He , Fangyi Li
|
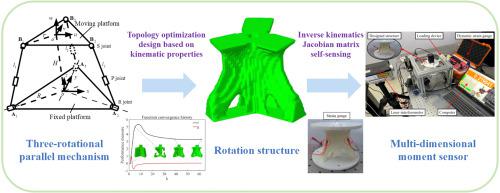
The structure and deformation force transfer path of the sensor elastomer are crucial to the sensing performance. In order to simplify the design process of the structure and the transmission path, this paper proposes a new design method based on the kinematic properties of the parallel mechanism for the topology optimization of the multi-dimensional force sensor elastomer. To establish the three-dimensional force/moment sensing transmission path, the differential kinematics Jacobian matrix of the three-translation/three-rotating parallel mechanism is calculated. Combining the Jacobian matrix with the differential strain energy, a novel SIMP algorithm of topology optimization is proposed. Furthermore, a topological model for three-dimensional force sensor is established and solved. Simulation and experimental results show that both elastomer structures have kinematic DOF constraints, and the amount of kinematic variation of the force is proportional to the original parallel mechanism kinematic Jacobian matrix. It is verified that the elastomer structure has motion isomorphism with the original parallel mechanism. The elastomer structure utilizes the inverse kinematics Jacobian matrix to realize the sensing ability, and the experimental evaluation of its sensing ability proves that it can be used as a force sensor. The effectiveness, generalization and simplicity of the proposed design method are verified.
中文翻译:

基于并联机构运动学特性的多维力传感器弹性体拓扑优化
传感器弹性体的结构和变形力传递路径对于传感性能至关重要。为了简化结构和传动路径的设计过程,提出一种基于并联机构运动学特性的多维力传感器弹性体拓扑优化设计方法。为了建立三维力/力矩传感传输路径,计算了三平移/三旋转并联机构的微分运动学雅可比矩阵。将雅可比矩阵与微分应变能相结合,提出了一种新颖的SIMP拓扑优化算法。此外,建立并求解了三维力传感器的拓扑模型。仿真和实验结果表明,两种弹性体结构均具有运动学自由度约束,力的运动学变化量与原始并联机构运动学雅可比矩阵成正比。验证了弹性体结构与原并联机构具有运动同构性。该弹性体结构利用逆运动学雅可比矩阵实现传感能力,其传感能力的实验评估证明其可以用作力传感器。验证了所提出的设计方法的有效性、通用性和简单性。
更新日期:2024-06-04
中文翻译:
基于并联机构运动学特性的多维力传感器弹性体拓扑优化
传感器弹性体的结构和变形力传递路径对于传感性能至关重要。为了简化结构和传动路径的设计过程,提出一种基于并联机构运动学特性的多维力传感器弹性体拓扑优化设计方法。为了建立三维力/力矩传感传输路径,计算了三平移/三旋转并联机构的微分运动学雅可比矩阵。将雅可比矩阵与微分应变能相结合,提出了一种新颖的SIMP拓扑优化算法。此外,建立并求解了三维力传感器的拓扑模型。仿真和实验结果表明,两种弹性体结构均具有运动学自由度约束,力的运动学变化量与原始并联机构运动学雅可比矩阵成正比。验证了弹性体结构与原并联机构具有运动同构性。该弹性体结构利用逆运动学雅可比矩阵实现传感能力,其传感能力的实验评估证明其可以用作力传感器。验证了所提出的设计方法的有效性、通用性和简单性。










































 京公网安备 11010802027423号
京公网安备 11010802027423号