当前位置:
X-MOL 学术
›
ACS Sustain. Chem. Eng.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Biodegradable and Flexible Wood-Gelatin Composites for Soft Actuating Systems
ACS Sustainable Chemistry & Engineering ( IF 7.1 ) Pub Date : 2024-05-30 , DOI: 10.1021/acssuschemeng.4c00306 Sophie Marie Koch 1, 2 , Christopher Hubert Dreimol 1, 2 , Christian Goldhahn 1 , Aline Maillard 1 , Andrina Stadler 1 , Tina Künniger 2 , Philippe Grönquist 3, 4 , Maximilian Ritter 1, 2 , Tobias Keplinger 1 , Ingo Burgert 1, 2
ACS Sustainable Chemistry & Engineering ( IF 7.1 ) Pub Date : 2024-05-30 , DOI: 10.1021/acssuschemeng.4c00306 Sophie Marie Koch 1, 2 , Christopher Hubert Dreimol 1, 2 , Christian Goldhahn 1 , Aline Maillard 1 , Andrina Stadler 1 , Tina Künniger 2 , Philippe Grönquist 3, 4 , Maximilian Ritter 1, 2 , Tobias Keplinger 1 , Ingo Burgert 1, 2
Affiliation
|
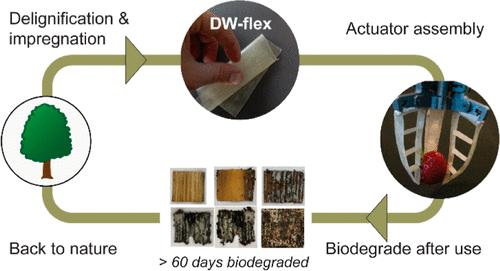
Compliant materials are indispensable for many emerging soft robotics applications. Hence, concerns regarding sustainability and end-of-life options for these materials are growing, given that they are predominantly petroleum-based and non-recyclable. Despite efforts to explore alternative bio-derived soft materials like gelatin, they frequently fall short in delivering the mechanical performance required for soft actuating systems. To address this issue, we reinforced a compliant and transparent gelatin-glycerol matrix with structure-retained delignified wood, resulting in a flexible and entirely biobased composite (DW-flex). This DW-flex composite exhibits highly anisotropic mechanical behavior, possessing higher strength and stiffness in the fiber direction and high deformability perpendicular to it. Implementing a distinct anisotropy in otherwise isotropic soft materials unlocks new possibilities for more complex movement patterns. To demonstrate the capability and potential of DW-flex, we built and modeled a fin ray-inspired gripper finger, which deforms based on a twist-bending-coupled motion that is tailorable by adjusting the fiber direction. Moreover, we designed a demonstrator for a proof-of-concept suitable for gripping a soft object with a complex shape, i.e., a strawberry. We show that this composite is entirely biodegradable in soil, enabling more sustainable approaches for soft actuators in robotics applications.
中文翻译:

用于软驱动系统的可生物降解和柔性木明胶复合材料
对于许多新兴的软机器人应用来说,合规材料是不可或缺的。因此,鉴于这些材料主要以石油为基础且不可回收,人们对这些材料的可持续性和报废选择的担忧与日俱增。尽管人们努力探索明胶等替代生物衍生软材料,但它们经常无法提供软驱动系统所需的机械性能。为了解决这个问题,我们用保留结构的脱木质素木材增强了顺应性且透明的明胶-甘油基质,从而形成了灵活且完全生物基的复合材料(DW-flex)。这种 DW-flex 复合材料表现出高度各向异性的机械行为,在纤维方向上具有更高的强度和刚度,以及垂直于纤维方向的高变形能力。在各向同性软材料中实现独特的各向异性,可以为更复杂的运动模式带来新的可能性。为了展示 DW-flex 的功能和潜力,我们构建并建模了一个受鳍射线启发的抓手手指,该抓手手指基于扭转弯曲耦合运动而变形,该运动可通过调整纤维方向进行定制。此外,我们还设计了一个用于概念验证的演示器,适用于抓取形状复杂的柔软物体(例如草莓)。我们证明,这种复合材料在土壤中完全可生物降解,从而为机器人应用中的软执行器提供更可持续的方法。
更新日期:2024-05-30
中文翻译:
用于软驱动系统的可生物降解和柔性木明胶复合材料
对于许多新兴的软机器人应用来说,合规材料是不可或缺的。因此,鉴于这些材料主要以石油为基础且不可回收,人们对这些材料的可持续性和报废选择的担忧与日俱增。尽管人们努力探索明胶等替代生物衍生软材料,但它们经常无法提供软驱动系统所需的机械性能。为了解决这个问题,我们用保留结构的脱木质素木材增强了顺应性且透明的明胶-甘油基质,从而形成了灵活且完全生物基的复合材料(DW-flex)。这种 DW-flex 复合材料表现出高度各向异性的机械行为,在纤维方向上具有更高的强度和刚度,以及垂直于纤维方向的高变形能力。在各向同性软材料中实现独特的各向异性,可以为更复杂的运动模式带来新的可能性。为了展示 DW-flex 的功能和潜力,我们构建并建模了一个受鳍射线启发的抓手手指,该抓手手指基于扭转弯曲耦合运动而变形,该运动可通过调整纤维方向进行定制。此外,我们还设计了一个用于概念验证的演示器,适用于抓取形状复杂的柔软物体(例如草莓)。我们证明,这种复合材料在土壤中完全可生物降解,从而为机器人应用中的软执行器提供更可持续的方法。




























 京公网安备 11010802027423号
京公网安备 11010802027423号