Nature Communications ( IF 14.7 ) Pub Date : 2024-05-04 , DOI: 10.1038/s41467-024-48058-x Liyang Mao 1 , Peng Yang 1 , Chenyao Tian 1 , Xingjian Shen 1 , Feihao Wang 1 , Hao Zhang 1 , Xianghe Meng 1 , Hui Xie 1
|
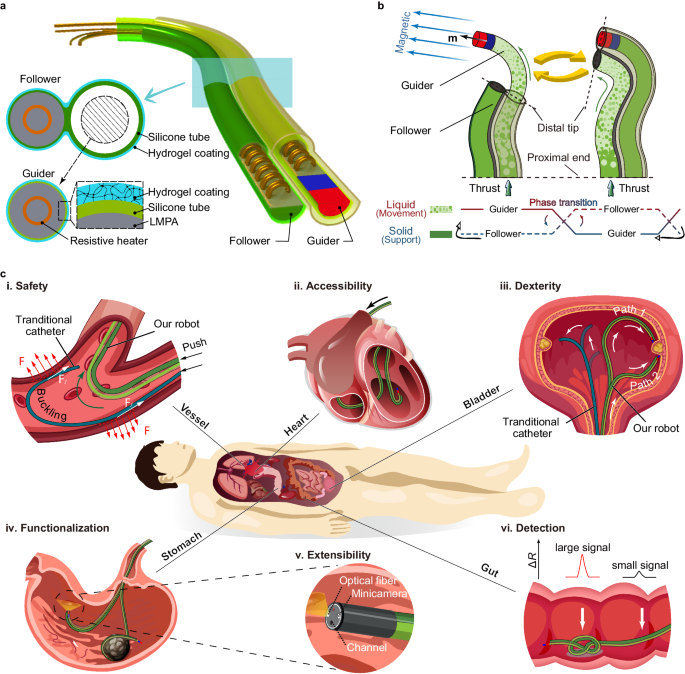
Millimeter-scale soft continuum robots offer safety and adaptability in transluminal procedures due to their passive compliance, but this feature necessitates interactions with surrounding lumina, leading to potential medical risks and restricted mobility. Here, we introduce a millimeter-scale continuum robot, enabling apical extension while maintaining structural stability. Utilizing phase transition components, the robot executes cycles of tip-based elongation, steered accurately through programmable magnetic fields. Each motion cycle features a solid-like backbone for stability, and a liquid-like component for advancement, thereby enabling autonomous shaping without reliance on environmental interactions. Together with clinical imaging technologies, we demonstrate the capability of navigating through tortuous and fragile lumina to transport microsurgical tools. Once it reaches larger anatomical spaces such as stomach, it can morph into functional 3D structures that serve as surgical tools or sensing units, overcoming the constraints of initially narrow pathways. By leveraging this design paradigm, we anticipate enhanced safety, multi-functionality, and cooperative capabilities among millimeter-scale continuum robots, opening new avenues for transluminal robotic surgery.
中文翻译:
用于腔内手术的磁力转向连续体机器人,具有可编程形状和功能
毫米级软连续体机器人由于其被动顺应性而在腔内手术中提供安全性和适应性,但这一功能需要与周围的腔体相互作用,从而导致潜在的医疗风险和活动受限。在这里,我们介绍了一种毫米级连续体机器人,可以在保持结构稳定性的同时实现顶端延伸。利用相变组件,机器人执行基于尖端的伸长循环,通过可编程磁场精确引导。每个运动周期都具有用于稳定性的类固体骨架和用于前进的类液体成分,从而能够在不依赖环境相互作用的情况下实现自主成形。与临床成像技术一起,我们展示了穿过曲折且脆弱的管腔来运输显微手术工具的能力。一旦它到达胃等更大的解剖空间,它就可以转变为功能性 3D 结构,用作手术工具或传感单元,克服最初狭窄通道的限制。通过利用这种设计范式,我们预计毫米级连续体机器人的安全性、多功能性和协作能力将得到增强,从而为腔内机器人手术开辟新途径。
































 京公网安备 11010802027423号
京公网安备 11010802027423号