当前位置:
X-MOL 学术
›
ACS Appl. Mater. Interfaces
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
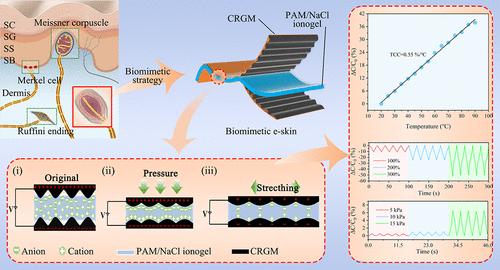
Biomimetic Electronic Skin Based on a Stretchable Ionogel Mechanoreceptor Composed of Crumpled Conductive Rubber Electrodes for Synchronous Strain, Pressure, and Temperature Detection
ACS Applied Materials & Interfaces ( IF 8.3 ) Pub Date : 2024-04-09 , DOI: 10.1021/acsami.4c01899 Xiaoyun Bi 1 , Manzhao Yao 1 , Zhaoyan Huang 1 , Zuhao Wang 1 , Huahao Shen 1 , Ching-Ping Wong 2 , Can Jiang 1
ACS Applied Materials & Interfaces ( IF 8.3 ) Pub Date : 2024-04-09 , DOI: 10.1021/acsami.4c01899 Xiaoyun Bi 1 , Manzhao Yao 1 , Zhaoyan Huang 1 , Zuhao Wang 1 , Huahao Shen 1 , Ching-Ping Wong 2 , Can Jiang 1
Affiliation
|
Electronic skin (e-skin) is showing a huge potential in human–computer interaction, intelligent robots, human health, motion monitoring, etc. However, it is still challenging for e-skin to realize distinguishable detection of stretching strain, vertical pressure, and temperature through a simple noncoupling structure design. Here, a stretchable multimodal biomimetic e-skin was fabricated by integrating layer-by-layer self-assembled crumpled reduced graphene oxide/multiwalled carbon nanotubes film on natural rubber (RGO/MWCNTs@NR) as stretchable conductive electrodes and polyacrylamide/NaCl ionogel as a dielectric layer into an ionotropic capacitive mechanoreceptor. Unlike natural skin receptors, the sandwich-like stretchable ionogel mechanoreceptor possessed a distinct ionotropic capacitive behavior for strain and pressure detection. The results showed that the biomimetic e-skin displayed a negative capacitance change with superior stretchability (0–300%) and a high gauge factor of 0.27 in 180–300% strain, while exhibiting a normal positive piezo-capacitance behavior in vertical pressure range of 0–15 kPa with a maximal sensitivity of 1.759 kPa–1. Based on this feature, the biomimetic e-skin showed an excellent synchronous detection capability of planar strain and vertical pressure in practical wearable applications such as gesture recognition and grasping movement detection without a complicated mathematical or signal decoupling process. In addition, the biomimetic e-skin exhibited a quantifiable linear responsiveness to temperature from 20–90 °C with a temperature coefficient of 0.55%/°C. These intriguing properties gave the biomimetic e-skin the ability to perform a complete function similar to natural skin but beyond its performance for future wearable devices and artificial intelligence devices.
中文翻译:

基于可拉伸离子凝胶机械感受器的仿生电子皮肤,该机械感受器由皱褶导电橡胶电极组成,用于同步应变、压力和温度检测
电子皮肤(e-skin)在人机交互、智能机器人、人类健康、运动监测等方面展现出巨大的潜力。然而,电子皮肤要实现拉伸应变、垂直压力、和温度通过简单的非耦合结构设计。在此,通过在天然橡胶(RGO/MWCNTs@NR)上集成逐层自组装皱缩还原氧化石墨烯/多壁碳纳米管薄膜作为可拉伸导电电极和聚丙烯酰胺/氯化钠离子凝胶作为可拉伸多模态仿生电子皮肤。介电层进入离子型电容性机械感受器。与天然皮肤感受器不同,三明治状可拉伸离子凝胶机械感受器具有独特的离子型电容行为,用于应变和压力检测。结果表明,仿生电子皮肤在 180-300% 应变下表现出负电容变化,具有优异的拉伸性 (0-300%) 和 0.27 的高应变系数,同时在垂直压力范围内表现出正常的正压电电容行为0–15 kPa,最大灵敏度为 1.759 kPa –1 。基于这一特性,仿生电子皮肤在手势识别和抓取运动检测等实际可穿戴应用中表现出优异的平面应变和垂直压力同步检测能力,而无需复杂的数学或信号解耦过程。此外,仿生电子皮肤在 20-90°C 的温度范围内表现出可量化的线性响应,温度系数为 0.55%/°C。 这些有趣的特性使仿生电子皮肤能够执行类似于天然皮肤的完整功能,但超出了未来可穿戴设备和人工智能设备的性能。
更新日期:2024-04-09
中文翻译:
基于可拉伸离子凝胶机械感受器的仿生电子皮肤,该机械感受器由皱褶导电橡胶电极组成,用于同步应变、压力和温度检测
电子皮肤(e-skin)在人机交互、智能机器人、人类健康、运动监测等方面展现出巨大的潜力。然而,电子皮肤要实现拉伸应变、垂直压力、和温度通过简单的非耦合结构设计。在此,通过在天然橡胶(RGO/MWCNTs@NR)上集成逐层自组装皱缩还原氧化石墨烯/多壁碳纳米管薄膜作为可拉伸导电电极和聚丙烯酰胺/氯化钠离子凝胶作为可拉伸多模态仿生电子皮肤。介电层进入离子型电容性机械感受器。与天然皮肤感受器不同,三明治状可拉伸离子凝胶机械感受器具有独特的离子型电容行为,用于应变和压力检测。结果表明,仿生电子皮肤在 180-300% 应变下表现出负电容变化,具有优异的拉伸性 (0-300%) 和 0.27 的高应变系数,同时在垂直压力范围内表现出正常的正压电电容行为0–15 kPa,最大灵敏度为 1.759 kPa –1 。基于这一特性,仿生电子皮肤在手势识别和抓取运动检测等实际可穿戴应用中表现出优异的平面应变和垂直压力同步检测能力,而无需复杂的数学或信号解耦过程。此外,仿生电子皮肤在 20-90°C 的温度范围内表现出可量化的线性响应,温度系数为 0.55%/°C。 这些有趣的特性使仿生电子皮肤能够执行类似于天然皮肤的完整功能,但超出了未来可穿戴设备和人工智能设备的性能。






























 京公网安备 11010802027423号
京公网安备 11010802027423号