当前位置:
X-MOL 学术
›
Robot. Comput.-Integr. Manuf.
›
论文详情
Our official English website, www.x-mol.net, welcomes your feedback! (Note: you will need to create a separate account there.)
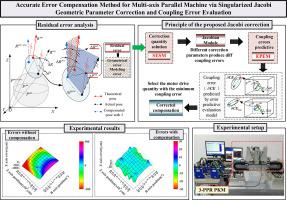
Accurate error compensation method for multi-axis parallel machine via singularized jacobi geometric parameter correction and coupling error evaluation
Robotics and Computer-Integrated Manufacturing ( IF 9.1 ) Pub Date : 2024-04-03 , DOI: 10.1016/j.rcim.2024.102771 Yuheng Luo , Jian Gao , Disai Chen , Lanyu Zhang , Yachao Liu , Yongbin Zhong
Robotics and Computer-Integrated Manufacturing ( IF 9.1 ) Pub Date : 2024-04-03 , DOI: 10.1016/j.rcim.2024.102771 Yuheng Luo , Jian Gao , Disai Chen , Lanyu Zhang , Yachao Liu , Yongbin Zhong
|
The Jacobian model is a prevalent tool for error compensation in multi-axis parallel mechanisms. However, discrepancies between the model's nominal and actual geometrical parameters, combined with equivalent replacements and high-order rounding in the modeling process, lead to equation solving challenges and modeling errors. These inaccuracies result in residual errors in the Jacobian model compensation. To address these problems, this paper proposes an optimal Jacobian correction approach. This is based on a geometrical parameter singularized Jacobian correction model, and a module for the evaluation of coupling errors for multi-axis parallel mechanisms was incorporated. Instead of relying on iterative processes, a singularized geometrical error solution method (SESM) was developed. Through this method, precise derivation of the Jacobian correction parameters is ensured, effectively addressing the indefinite equation challenge and partial posture non-solution problem. Moreover, modeling errors resulting from equivalent infinitesimal replacements and the overlooking of high-order minor values are compensated for by the SESM. It was observed that varying singularized geometrical parameters in the Jacobian model can produce different coupling effects and compensation outcomes. Therefore, a sensitivity-based error predictive evaluation method (EPEM) was introduced. By this method, the optimal correction parameter of the Jacobian model across the entire workspace is identified, ensuring precise pose error compensation. The proposed method was validated using a three-axis parallel mechanism. Through these tests, its superior efficacy was revealed. In comparison to the traditional uncorrected Jacobian compensation, reductions in position and orientation errors by 64.93% and 55.29%, respectively, were achieved. This method provides a new approach for error modeling, equation solving, and parameter correction for multi-axis mechanism error compensation and precision equipment development.
中文翻译:

奇异雅可比几何参数修正及耦合误差评估的多轴并联机精确误差补偿方法
雅可比模型是多轴并联机构中误差补偿的常用工具。然而,模型的名义几何参数与实际几何参数之间的差异,加上建模过程中的等效替换和高阶舍入,导致方程求解困难和建模错误。这些不准确性导致雅可比模型补偿中出现残余误差。为了解决这些问题,本文提出了一种最优雅可比校正方法。这是基于几何参数奇异雅可比校正模型,并结合了用于评估多轴并联机构耦合误差的模块。开发了奇异几何误差求解方法(SESM),而不是依赖迭代过程。通过该方法,保证了雅可比校正参数的精确推导,有效解决了不定方程挑战和部分姿态无解问题。此外,由等效无穷小替换和忽略高阶次要值导致的建模误差由 SESM 补偿。据观察,雅可比模型中不同的奇异几何参数可以产生不同的耦合效应和补偿结果。因此,引入了基于灵敏度的误差预测评估方法(EPEM)。通过该方法,可以识别整个工作空间内雅可比模型的最佳校正参数,确保精确的位姿误差补偿。使用三轴并联机构对所提出的方法进行了验证。通过这些测试,揭示了其优越的功效。与传统的未校正雅可比补偿相比,位置和方向误差减少了 64。分别达到了93%和55.29%。该方法为多轴机构误差补偿和精密装备开发提供了误差建模、方程求解和参数修正的新途径。
更新日期:2024-04-03
中文翻译:
奇异雅可比几何参数修正及耦合误差评估的多轴并联机精确误差补偿方法
雅可比模型是多轴并联机构中误差补偿的常用工具。然而,模型的名义几何参数与实际几何参数之间的差异,加上建模过程中的等效替换和高阶舍入,导致方程求解困难和建模错误。这些不准确性导致雅可比模型补偿中出现残余误差。为了解决这些问题,本文提出了一种最优雅可比校正方法。这是基于几何参数奇异雅可比校正模型,并结合了用于评估多轴并联机构耦合误差的模块。开发了奇异几何误差求解方法(SESM),而不是依赖迭代过程。通过该方法,保证了雅可比校正参数的精确推导,有效解决了不定方程挑战和部分姿态无解问题。此外,由等效无穷小替换和忽略高阶次要值导致的建模误差由 SESM 补偿。据观察,雅可比模型中不同的奇异几何参数可以产生不同的耦合效应和补偿结果。因此,引入了基于灵敏度的误差预测评估方法(EPEM)。通过该方法,可以识别整个工作空间内雅可比模型的最佳校正参数,确保精确的位姿误差补偿。使用三轴并联机构对所提出的方法进行了验证。通过这些测试,揭示了其优越的功效。与传统的未校正雅可比补偿相比,位置和方向误差减少了 64。分别达到了93%和55.29%。该方法为多轴机构误差补偿和精密装备开发提供了误差建模、方程求解和参数修正的新途径。











































 京公网安备 11010802027423号
京公网安备 11010802027423号