npj Flexible Electronics ( IF 12.3 ) Pub Date : 2024-03-07 , DOI: 10.1038/s41528-024-00302-6 Hwajoong Kim , Hyunbin Na , Seungbeom Noh , Shinwon Chang , Jinho Kim , Taejune Kong , Gyowook Shin , Chankyu Lee , Seonggyu Lee , Yong-Lae Park , Sehoon Oh , Jaehong Lee
|
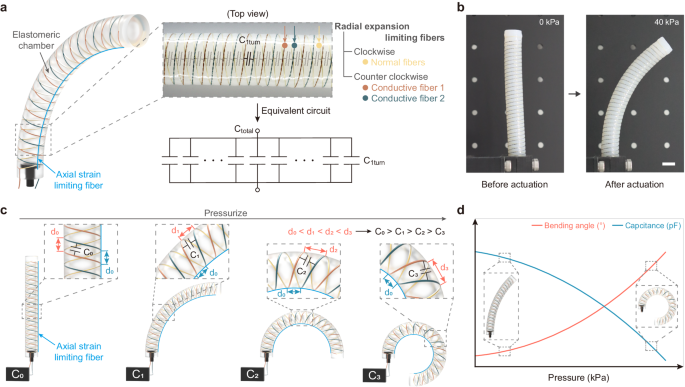
For the accurate and continuous control of soft actuators in dynamic environments, the movements of the soft actuators must be monitored in real-time. To this end, various soft actuators capable of self-monitoring have been developed by separately integrating sensing devices into actuators. However, integrating such heterogeneous sensing components into soft actuators results in structural complexity, high manufacturing costs, and poor interfacial stability. Here, we report on intelligent pneumatic fiber-reinforced soft actuators with an inherent flexible proprioceptive sensor that uses only the essential components of typical fiber-reinforced soft actuators. The inherent flexible proprioceptive sensor is achieved by leveraging two parallel conductive microfibers around an elastomeric chamber of the soft actuator, which simultaneously acts as both a capacitive bending sensor and radial expansion limiting fibers of typical fiber-reinforced soft actuators. The proprioceptive soft actuator exhibits excellent mechanical actuation up to 240° bending motion and proprioceptive sensing performance with high sensitivity of 1.2 pF rad−1. Mathematical analysis and simulations of the soft actuator can effectively predict the bending actuation and capacitive responses against input pressures. We demonstrate that proprioceptive soft actuators can be used to construct a soft gripping system and prosthetic hand which express various hand gestures and perform dexterous manipulation with real-time proprioceptive sensing capability.
中文翻译:
用于反馈控制软执行器的固有集成的基于微纤维的柔性本体感觉传感器
为了在动态环境中精确、连续地控制软执行器,必须实时监控软执行器的运动。为此,通过将传感装置单独集成到执行器中,开发了各种能够自我监控的软执行器。然而,将这种异构传感组件集成到软执行器中会导致结构复杂、制造成本高和界面稳定性差。在这里,我们报告了智能气动纤维增强软致动器,其具有固有的柔性本体感觉传感器,仅使用典型纤维增强软致动器的基本组件。固有的柔性本体感受传感器是通过在软致动器的弹性室周围利用两个平行的导电微纤维来实现的,该微纤维同时充当电容式弯曲传感器和典型纤维增强软致动器的径向膨胀限制纤维。本体感觉软执行器表现出高达240°弯曲运动的出色机械驱动和本体感觉传感性能,灵敏度高达1.2 pF rad -1 。软致动器的数学分析和仿真可以有效地预测针对输入压力的弯曲致动和电容响应。我们证明,本体感觉软执行器可用于构建软握持系统和假手,表达各种手势并通过实时本体感觉传感能力执行灵巧操作。
































 京公网安备 11010802027423号
京公网安备 11010802027423号