当前位置:
X-MOL 学术
›
Adv. Healthcare Mater.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Design and Control of the Magnetically Actuated Micro/Nanorobot Swarm toward Biomedical Applications
Advanced Healthcare Materials ( IF 10.0 ) Pub Date : 2024-02-27 , DOI: 10.1002/adhm.202400414 Lu Lu 1 , Hongqiao Zhao 1 , Yucong Lu 1 , Yuxuan Zhang 1 , Xinran Wang 1 , Chengjuan Fan 2 , Zesheng Li 3 , Zhiguang Wu 1, 4, 5
Advanced Healthcare Materials ( IF 10.0 ) Pub Date : 2024-02-27 , DOI: 10.1002/adhm.202400414 Lu Lu 1 , Hongqiao Zhao 1 , Yucong Lu 1 , Yuxuan Zhang 1 , Xinran Wang 1 , Chengjuan Fan 2 , Zesheng Li 3 , Zhiguang Wu 1, 4, 5
Affiliation
|
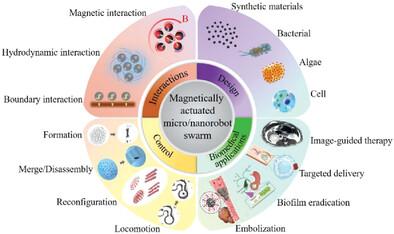
Recently, magnetically actuated micro/nanorobots hold extensive promises in biomedical applications due to their advantages of noninvasiveness, fuel-free operation, and programmable nature. While effectively promised in various fields such as targeted delivery, most past investigations are mainly displayed in magnetic control of individual micro/nanorobots. Facing practical medical use, the micro/nanorobots are required for the development of swarm control in a closed-loop control manner. This review outlines the recent developments in magnetic micro/nanorobot swarms, including their actuating fundamentals, designs, controls, and biomedical applications. The fundamental principles and interactions involved in the formation of magnetic micro/nanorobot swarms are discussed first. The recent advances in the design of artificial and biohybrid micro/nanorobot swarms, along with the control devices and methods used for swarm manipulation, are presented. Furthermore, biomedical applications that have the potential to achieve clinical application are introduced, such as imaging-guided therapy, targeted delivery, embolization, and biofilm eradication. By addressing the potential challenges discussed toward the end of this review, magnetic micro/nanorobot swarms hold promise for clinical treatments in the future.
中文翻译:

面向生物医学应用的磁驱动微/纳米机器人群的设计和控制
近年来,磁驱动微纳米机器人由于其非侵入性、无燃料操作和可编程性等优点,在生物医学应用中具有广泛的前景。虽然在定向递送等各个领域得到了有效承诺,但过去的大多数研究主要集中在单个微/纳米机器人的磁控制上。面向实际医疗应用,微纳米机器人需要发展闭环控制方式的群体控制。本综述概述了磁性微/纳米机器人群的最新发展,包括其驱动原理、设计、控制和生物医学应用。首先讨论磁性微/纳米机器人群形成所涉及的基本原理和相互作用。介绍了人工和生物混合微/纳米机器人群体设计的最新进展,以及用于群体操纵的控制装置和方法。此外,还介绍了具有临床应用潜力的生物医学应用,例如影像引导治疗、靶向递送、栓塞和生物膜清除等。通过解决本综述最后讨论的潜在挑战,磁性微/纳米机器人群有望在未来的临床治疗中发挥作用。
更新日期:2024-02-27
中文翻译:
面向生物医学应用的磁驱动微/纳米机器人群的设计和控制
近年来,磁驱动微纳米机器人由于其非侵入性、无燃料操作和可编程性等优点,在生物医学应用中具有广泛的前景。虽然在定向递送等各个领域得到了有效承诺,但过去的大多数研究主要集中在单个微/纳米机器人的磁控制上。面向实际医疗应用,微纳米机器人需要发展闭环控制方式的群体控制。本综述概述了磁性微/纳米机器人群的最新发展,包括其驱动原理、设计、控制和生物医学应用。首先讨论磁性微/纳米机器人群形成所涉及的基本原理和相互作用。介绍了人工和生物混合微/纳米机器人群体设计的最新进展,以及用于群体操纵的控制装置和方法。此外,还介绍了具有临床应用潜力的生物医学应用,例如影像引导治疗、靶向递送、栓塞和生物膜清除等。通过解决本综述最后讨论的潜在挑战,磁性微/纳米机器人群有望在未来的临床治疗中发挥作用。



















































 京公网安备 11010802027423号
京公网安备 11010802027423号