Annals of Biomedical Engineering ( IF 3.0 ) Pub Date : 2024-01-21 , DOI: 10.1007/s10439-023-03434-4 İsmail Devecioğlu 1 , Ertuğrul Karakulak 2
|
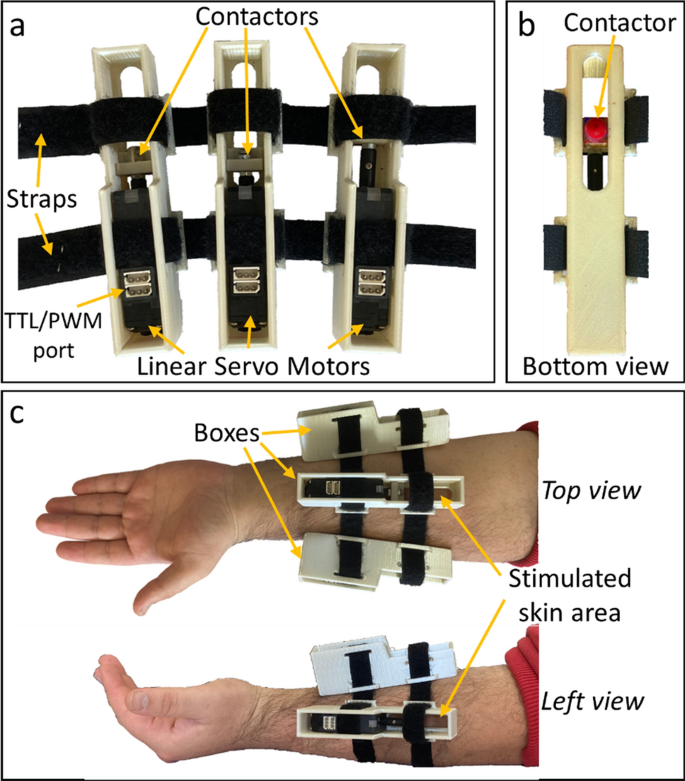
The purpose was to assess the effectiveness of three sliding tactile probes placed on the forelimb skin to provide proprioceptive feedback for the detection of hand gestures and discrimination of object size. Tactile contactors representing the first three fingers were driven along the proximodistal axis by linear servo motors. Twenty healthy subjects were involved in the gesture detection test, with 10 of them also participating in the object-size discrimination task. Motors were controlled by computer in the first four sessions of the gesture detection experiment, while the fifth session utilized a sensorized glove. Both the volar and dorsal sides of the forearm were examined. In the object-size discrimination experiment, the method was exclusively assessed on the volar surface under four distinct feedback conditions, including all fingers and each finger separately. The psychophysical data were further analyzed using a structural equation model (SEM) to evaluate the specific contributions of each individual contactor. Subjects consistently outperformed the chance level in detecting gestures. Performance improved up to the third session, with better results obtained on the volar side. The performances were similar in the fourth and fifth sessions. The just noticeable difference for achieving a 75% discrimination accuracy was found to be 2.90 mm of movement on the skin. SEM analysis indicated that the contactor for the index finger had the lowest importance in gesture detection, while it played a more significant role in object-size discrimination. However, all fingers were found to be significant predictors of subjects' responses in both experiments, except for the thumb, which was deemed insignificant in object-size discrimination. The study highlights the importance of considering the partial contribution of each degree of freedom in a sensory feedback system, especially concerning the task, when designing such systems.
中文翻译:
放置在前肢皮肤上的三个滑动探针可提供差异但互补的本体感觉反馈,有助于手势检测和物体大小辨别
目的是评估放置在前肢皮肤上的三个滑动触觉探针为检测手势和辨别物体大小提供本体感觉反馈的有效性。代表前三个手指的触觉接触器由线性伺服电机沿着近远轴驱动。 20 名健康受试者参与了手势检测测试,其中 10 名还参与了物体大小辨别任务。在手势检测实验的前四次中,电机由计算机控制,而第五次则使用传感手套。检查前臂的掌侧和背侧。在物体大小辨别实验中,该方法仅在四种不同的反馈条件下在掌侧表面进行评估,包括所有手指和每个手指。使用结构方程模型(SEM)进一步分析心理物理数据,以评估每个接触者的具体贡献。受试者在检测手势方面始终优于偶然水平。到第三节时,表现有所改善,掌侧取得了更好的结果。第四节和第五节的表现相似。发现实现 75% 辨别准确度的唯一明显差异是皮肤上的 2.90 毫米移动。 SEM 分析表明,食指的接触器在手势检测中重要性最低,而在物体大小辨别中发挥着更重要的作用。然而,在这两个实验中,所有手指都被发现是受试者反应的重要预测因子,除了拇指之外,拇指在物体大小辨别中被认为是无关紧要的。 该研究强调了在设计此类系统时考虑感觉反馈系统中每个自由度的部分贡献的重要性,尤其是与任务相关的部分。





























 京公网安备 11010802027423号
京公网安备 11010802027423号