当前位置:
X-MOL 学术
›
Nat. Commun.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
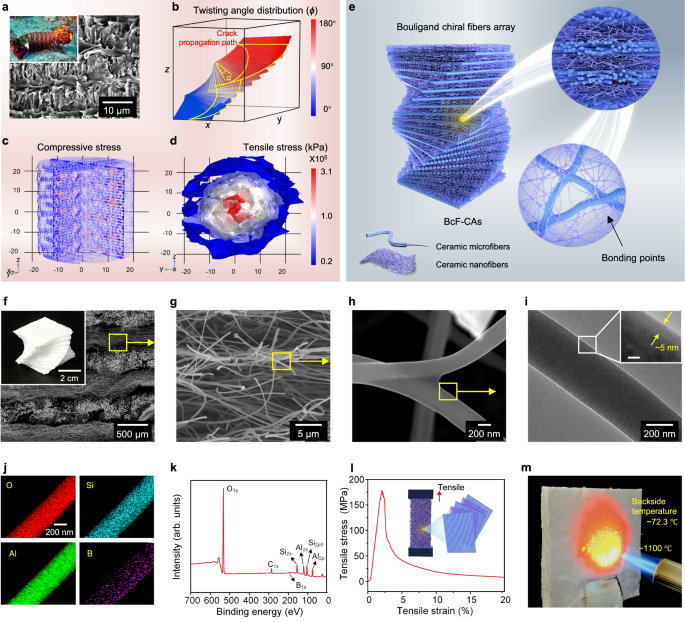
仿生 Bouligand 手性纤维阵列可实现坚固且超弹性的陶瓷气凝胶
Nature Communications ( IF 14.7 ) Pub Date : 2024-01-06 , DOI: 10.1038/s41467-023-44657-2 Hongxing Wang 1 , Longdi Cheng 1 , Jianyong Yu 1, 2 , Yang Si 1, 2 , Bin Ding 1, 2
Affiliation
|
当需要隔热材料时,通常会使用陶瓷气凝胶;然而,它们仍然受到热冲击下机械稳定性差的困扰。在这里,受到自然界中发现的螳螂虾指节的启发,这些指节通过定向组装成分层、手性和 Bouligand(扭曲胶合板)结构而形成,表现出卓越的机械性能,我们提出了一种成分和结构工程策略,以开发坚固、超弹性和疲劳的性能具有类似于 Bouligand 结构的手性纤维阵列的电阻陶瓷气凝胶。得益于微/纳米级 Bouligand 阵列的应力消散、裂纹扭转和机械增强,这些气凝胶的拉伸强度(170.38 MPa)比现有技术高出一到两个数量级纳米纤维气凝胶。此外,所开发的气凝胶具有低密度和导热性、良好的压缩性能(可从 80% 应变快速恢复)以及高达 1200 °C 的热稳定性,使其成为隔热应用的理想选择。
"点击查看英文标题和摘要"




















































 京公网安备 11010802027423号
京公网安备 11010802027423号