Acta Mechanica ( IF 2.3 ) Pub Date : 2024-01-09 , DOI: 10.1007/s00707-023-03828-4
Yan Deng , Hornsen Tzou
|
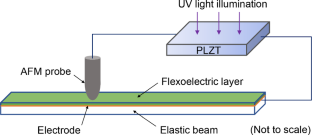
Photo-driven flexoelectric actuators combine the advantages of wireless photovoltaic generator and flexoelectric precision actuation, and thus can realize non-contact precision actuation and vibration control of structures. This study presents a novel hybrid photovoltaic/flexoelectric actuation mechanism by using PbLaZrTi (PLZT) as a photovoltaic generator to drive a flexoelectric actuator consisting of an atomic force microscope (AFM) probe and a flexoelectric layer covered with an electrode layer. Spatial-time distributions of the opto-flexoelectric-induced control moments are calculated. Static deflection control and dynamic vibration control of cantilever beams are investigated, and independent modal control effects are evaluated. Analysis results demonstrate that this photovoltaic/flexoelectric actuation mechanism can effectively accelerate the beam damping process. The control effects by the Lyapunov controls are better than those via the proportional feedback and velocity feedback controls. The customization of modal control forces can be realized via a non-contact strategy by adjusting the light intensity and pre-illumination time. Design issues related to the optimal position of AFM probe and actuator size are also addressed.
中文翻译:
一种应用于梁的精密驱动和振动控制的混合光伏/柔性驱动机构
光驱动柔性电动执行器结合了无线光伏发电和柔性电动精密驱动的优点,可实现结构的非接触式精密驱动和振动控制。这项研究提出了一种新颖的混合光伏/挠曲电驱动机制,使用 PbLaZrTi (PLZT) 作为光伏发电机来驱动挠曲电致动器,该挠曲电致动器由原子力显微镜 (AFM) 探针和覆盖有电极层的挠曲电层组成。计算了光柔电感应控制力矩的时空分布。研究了悬臂梁的静态挠度控制和动态振动控制,并评估了独立模态控制效果。分析结果表明,这种光伏/柔性电驱动机构可以有效加速梁阻尼过程。Lyapunov控制的控制效果优于比例反馈和速度反馈控制。通过调整光强度和预照明时间,可以通过非接触策略实现模态控制力的定制。还解决了与 AFM 探针最佳位置和执行器尺寸相关的设计问题。
































 京公网安备 11010802027423号
京公网安备 11010802027423号