Scientific Reports ( IF 3.8 ) Pub Date : 2023-12-27 , DOI: 10.1038/s41598-023-50329-4
Leone Costi 1 , Fumiya Iida 1
|
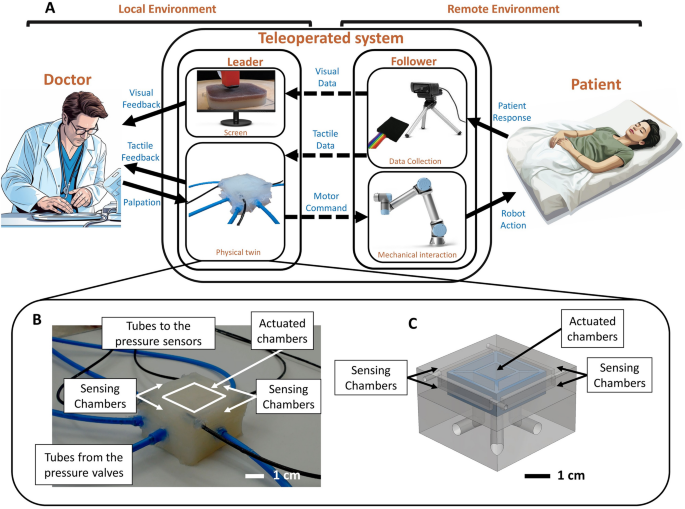
Teleoperated medical technologies are a fundamental part of the healthcare system. From telemedicine to remote surgery, they allow remote diagnosis and treatment. However, the absence of any interface able to effectively reproduce the sense of touch and interaction with the patient prevents the implementation of teleoperated systems for primary care examinations, such as palpation. In this paper, we propose the first reported case of a soft robotic bilateral physical twin for remote palpation. By creating an entirely soft interface that can be used both to control the robot and receive feedback, the proposed device allows the user to achieve remote palpation by simply palpating the soft physical twin. This is achieved through a compact design showcasing 9 pneumatic chambers and exploiting multi-silicone casting to minimize cross-noise and allow teleoperation. A comparative study has been run against a traditional setup, and both the control and feedback of the physical twin are carefully analyzed. Despite distributed tactile feedback not achieving the same performance as the visual map, the soft control and visual feedback combination showcases a 5.1% higher accuracy. Moreover, the bilateral soft physical twin results always in a less invasive procedure, with 41% lower mechanical work exchanged with the remote phantom.
中文翻译:
多硅胶双边软物理双胞胎作为远程触诊传统用户界面的替代品:比较研究
远程操作医疗技术是医疗保健系统的基本组成部分。从远程医疗到远程手术,它们可以实现远程诊断和治疗。然而,缺乏任何能够有效地再现触觉和与患者互动的界面,阻碍了用于初级保健检查(例如触诊)的远程操作系统的实施。在本文中,我们提出了第一个报道的用于远程触诊的软机器人双边物理双胞胎的案例。通过创建一个可用于控制机器人和接收反馈的完全软接口,所提出的设备允许用户通过简单地触诊软物理双胞胎来实现远程触诊。这是通过紧凑的设计实现的,该设计展示了 9 个气动室,并利用多硅铸造来最大限度地减少交叉噪音并允许远程操作。我们针对传统设置进行了比较研究,并仔细分析了物理双胞胎的控制和反馈。尽管分布式触觉反馈无法达到与视觉地图相同的性能,但软控制和视觉反馈组合的准确度提高了 5.1%。此外,双侧软物理双胞胎始终可以实现侵入性较小的手术,与远程体模交换的机械功减少 41%。
































 京公网安备 11010802027423号
京公网安备 11010802027423号