Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
Skin-Inspired Capacitive Flexible Tactile Sensor with an Asymmetric Structure for Detecting Directional Shear Forces
Advanced Science ( IF 14.3 ) Pub Date : 2023-12-07 , DOI: 10.1002/advs.202305883 Haibo Yu 1, 2 , Hongji Guo 1, 2 , Jingang Wang 1, 2, 3 , Tianming Zhao 1, 2 , Wuhao Zou 1, 2, 3 , Peilin Zhou 4 , Zhuang Xu 1, 2 , Yuzhao Zhang 1, 2, 3 , Jianchen Zheng 1, 2, 3 , Ya Zhong 1, 2, 3 , Xiaoduo Wang 1, 2 , Lianqing Liu 1, 2
Advanced Science ( IF 14.3 ) Pub Date : 2023-12-07 , DOI: 10.1002/advs.202305883 Haibo Yu 1, 2 , Hongji Guo 1, 2 , Jingang Wang 1, 2, 3 , Tianming Zhao 1, 2 , Wuhao Zou 1, 2, 3 , Peilin Zhou 4 , Zhuang Xu 1, 2 , Yuzhao Zhang 1, 2, 3 , Jianchen Zheng 1, 2, 3 , Ya Zhong 1, 2, 3 , Xiaoduo Wang 1, 2 , Lianqing Liu 1, 2
Affiliation
|
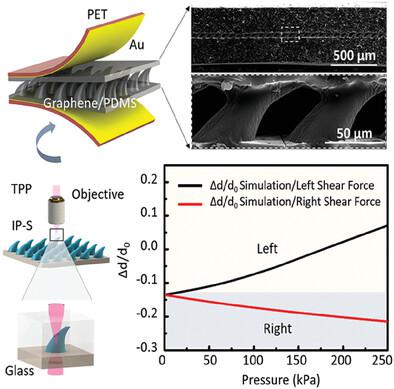
Flexible pressure sensors based on micro-/nanostructures can be integrated into robots to achieve sensitive tactile perception. However, conventional symmetric structures, such as pyramids or hemispheres, can sense only the magnitude of a force and not its direction. In this study, a capacitive flexible tactile sensor inspired by skin structures and based on an asymmetric microhair structure array to perceive directional shear force is designed. Asymmetric microhair structures are obtained by two-photon polymerization (TPP) and replication. Owing to the features of asymmetric microhair structures, different shear force directions result in different deformations. The designed device can determine the directions of both static and dynamic shear forces. Additionally, it exhibits large response scales ranging from 30 Pa to 300 kPa and maintains high stability even after 5000 cycles; the final relative capacitive change (ΔC/C0) is <2.5%. This flexible tactile sensor has the potential to improve the perception and manipulation ability of dexterous hands and enhance the intelligence of robots.
中文翻译:

具有不对称结构的仿皮肤电容式柔性触觉传感器,用于检测定向剪切力
基于微/纳米结构的柔性压力传感器可以集成到机器人中以实现灵敏的触觉感知。然而,传统的对称结构,例如金字塔或半球,只能感知力的大小,而不能感知力的方向。本研究设计了一种受皮肤结构启发、基于不对称微毛结构阵列来感知定向剪切力的电容式柔性触觉传感器。通过双光子聚合(TPP)和复制获得不对称微毛结构。由于微毛结构不对称的特点,不同的剪切力方向会导致不同的变形。设计的装置可以确定静态和动态剪切力的方向。此外,它具有30 Pa至300 kPa的大响应范围,即使在5000次循环后仍保持高稳定性;最终相对电容变化(Δ C / C 0 )<2.5%。这种柔性触觉传感器有潜力提高灵巧手的感知和操纵能力,增强机器人的智能。
更新日期:2023-12-07
中文翻译:
具有不对称结构的仿皮肤电容式柔性触觉传感器,用于检测定向剪切力
基于微/纳米结构的柔性压力传感器可以集成到机器人中以实现灵敏的触觉感知。然而,传统的对称结构,例如金字塔或半球,只能感知力的大小,而不能感知力的方向。本研究设计了一种受皮肤结构启发、基于不对称微毛结构阵列来感知定向剪切力的电容式柔性触觉传感器。通过双光子聚合(TPP)和复制获得不对称微毛结构。由于微毛结构不对称的特点,不同的剪切力方向会导致不同的变形。设计的装置可以确定静态和动态剪切力的方向。此外,它具有30 Pa至300 kPa的大响应范围,即使在5000次循环后仍保持高稳定性;最终相对电容变化(Δ C / C 0 )<2.5%。这种柔性触觉传感器有潜力提高灵巧手的感知和操纵能力,增强机器人的智能。
































 京公网安备 11010802027423号
京公网安备 11010802027423号