Computational Visual Media ( IF 17.3 ) Pub Date : 2023-11-30 , DOI: 10.1007/s41095-022-0308-2 Chenyi Liu , Fei Chen , Lu Deng , Renjiao Yi , Lintao Zheng , Chenyang Zhu , Jia Wang , Kai Xu
|
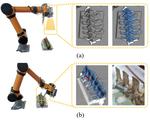
The point pair feature (PPF) is widely used for 6D pose estimation. In this paper, we propose an efficient 6D pose estimation method based on the PPF framework. We introduce a well-targeted down-sampling strategy that focuses on edge areas for efficient feature extraction for complex geometry. A pose hypothesis validation approach is proposed to resolve ambiguity due to symmetry by calculating the edge matching degree. We perform evaluations on two challenging datasets and one real-world collected dataset, demonstrating the superiority of our method for pose estimation for geometrically complex, occluded, symmetrical objects. We further validate our method by applying it to simulated punctures.
中文翻译:
基于边缘增强点对特征的 3D 刚性物体的 6DOF 位姿估计
点对特征(PPF)广泛用于 6D 姿态估计。在本文中,我们提出了一种基于PPF框架的高效6D姿态估计方法。我们引入了一种有针对性的下采样策略,该策略专注于边缘区域,以便对复杂几何体进行有效的特征提取。提出了一种姿态假设验证方法,通过计算边缘匹配度来解决由于对称性引起的歧义。我们对两个具有挑战性的数据集和一个现实世界收集的数据集进行评估,证明了我们的方法对于几何复杂、遮挡、对称物体的姿态估计的优越性。我们通过将其应用于模拟穿刺来进一步验证我们的方法。





























 京公网安备 11010802027423号
京公网安备 11010802027423号