Journal of Colloid and Interface Science ( IF 9.4 ) Pub Date : 2023-11-29 , DOI: 10.1016/j.jcis.2023.11.173 Yuan Wang 1 , Xinwu Ba 2 , Bo Zhang 1 , Yu Wang 1 , Yonggang Wu 1 , Hailei Zhang 3
|
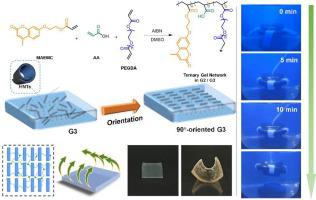
Gel actuators are a kind of soft intelligent material that can convert external stimuli into deformations to generate mechanical responses. The development of gel actuators with advanced structures to integrate multiple responsiveness, programmability, and fast deformation ability is urgently needed. Here, we explored a poly(7-(2-methacryloyloxyethoxy)-4-methylcoumarin-co-acrylic acid-co-glycol) ternary gel network as an actuator with reprogrammable photo/H2O dual responsibilities. In such a design, [2 + 2] photodimerization and photocleavage reactions of coumarin moieties can be realized under 365 and 254 nm light irradiation, respectively, affording reversible photodriven behaviour of the gels. The abundant carboxylic acid in the backbone has the capacity to form additional crosslinks to assist and accelerate the photodriven behaviour. The incorporation and orientation of halloysite nanotubes (HNTs) in gel matrices support an axial direction force and result in a more controllable and programmable actuating behaviour. The synergistic response enables fast grasping-releasing of 5-times the weight of the object in water within 10 min by fabricating HNT-incorporated gels as a four-arm gripper.
中文翻译:
埃洛石纳米管作为纳米支撑基质,用于对光/H2O双触发可逆凝胶执行器进行编程
凝胶执行器是一种软智能材料,可以将外部刺激转化为变形以产生机械响应。迫切需要开发具有先进结构的凝胶致动器,以集成多重响应性、可编程性和快速变形能力。在这里,我们探索了聚(7-(2-甲基丙烯酰氧基乙氧基)-4-甲基香豆素-丙烯酸-乙二醇)三元凝胶网络作为具有可重新编程的光/H 2 O双重责任的执行器。在这样的设计中,香豆素部分的[2+2]光二聚和光裂解反应可以分别在365和254 nm光照射下实现,从而提供凝胶的可逆光驱动行为。主链中丰富的羧酸能够形成额外的交联,以协助和加速光驱动行为。埃洛石纳米管 (HNT) 在凝胶基质中的掺入和定向支持轴向力,并导致更可控和可编程的驱动行为。通过将掺有 HNT 的凝胶制造为四臂夹持器,协同响应能够在 10 分钟内快速抓取-释放水中物体重量的 5 倍。




























 京公网安备 11010802027423号
京公网安备 11010802027423号