Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
从超快到超慢的仿生执行器的仿生策略
Nano Research ( IF 9.5 ) Pub Date : 2023-09-18 , DOI: 10.1007/s12274-023-6092-1
Man Yang , Feilong Zhang , Shutao Wang

"点击查看英文标题和摘要"
更新日期:2023-09-18
Nano Research ( IF 9.5 ) Pub Date : 2023-09-18 , DOI: 10.1007/s12274-023-6092-1
Man Yang , Feilong Zhang , Shutao Wang
|
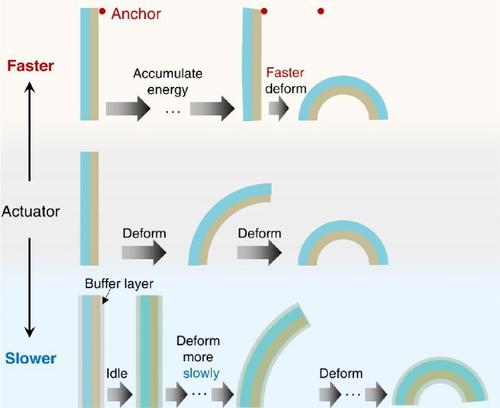
运动植物组织可以根据其特定要求控制其配置并调节其运动速度,这为具有受控运动速度的仿生执行器提供了各种原型。从这个角度来看,我们重点关注植物组织的速度控制和人工执行器速度调节的仿生策略。我们首先总结了运动植物组织控制运动速度(从超快到超慢)的策略和机制。然后,我们举例说明了制造仿生人工执行器的模型,并简要讨论了当前从超快到超慢速度的执行器的应用场景。最后,我们提出了执行器速度调节的潜在策略。
"点击查看英文标题和摘要"
































 京公网安备 11010802027423号
京公网安备 11010802027423号