当前位置:
X-MOL 学术
›
Veh. Commun.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
V2X仿真的重要性:使用高保真通信仿真对交叉口控制算法进行深入比较
Vehicular Communications ( IF 5.8 ) Pub Date : 2023-09-15 , DOI: 10.1016/j.vehcom.2023.100676 Tamás Ormándi , Balázs Varga

"点击查看英文标题和摘要"
更新日期:2023-09-15
Vehicular Communications ( IF 5.8 ) Pub Date : 2023-09-15 , DOI: 10.1016/j.vehcom.2023.100676 Tamás Ormándi , Balázs Varga
|
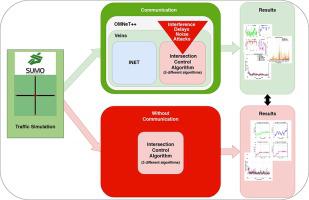
车辆到车辆和车辆到基础设施通信的快速发展为各种控制算法打开了大门,其中一个特定领域是交叉口控制。一些研究人员提出了基于通信的交叉口控制算法,省略了传统的交通信号灯,有望提高吞吐量并提高交通安全。另一方面,这些算法中的大多数都忽略了通信的不确定性和延迟,并忽略了由互联流量打开的新网络攻击向量。本研究采用了高度详细的车辆通信模拟,以突出不同的自主交叉口控制算法(集中式和分散式)对通信相关缺陷的敏感性。本文以比较的方式研究了从文献中借用的五种不同算法。这项研究重点关注与流量相关的参数,例如平均速度、占用率和网络吞吐量,同时还分析与通信相关的参数(例如,数据包丢失、计算需求)并考虑可能的攻击向量。仿真结果表明,即使是最简单的控制逻辑也会对通信故障敏感,导致路口吞吐量低于传统路口控制,甚至危及交通安全。对于集中式算法,在存在噪声的情况下,平均速度显着下降,这表明交叉口吞吐量减少,甚至先到先服务算法出现堵塞。去中心化算法可能会受到传入消息订单的严重影响,这可能会导致危险的情况。在模拟过程中,蒙特卡罗树搜索算法记录了多次碰撞。依赖于对车辆轨迹进行准确预测的更复杂的算法对噪声更敏感,甚至在模拟中产生事故。总之,无论控制架构如何,评估的算法都需要额外的后备解决方案和冗余来保证交通安全。
"点击查看英文标题和摘要"






























 京公网安备 11010802027423号
京公网安备 11010802027423号