当前位置:
X-MOL 学术
›
Adv. Mater. Technol.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
液态金属/Nd2Fe14B/Ecoflex复合软机器人及其使用非接触触手的电信号传输
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2023-08-15 , DOI: 10.1002/admt.202300827 Shanfei Zhang 1 , Yamei Yue 1 , Yizhuo Xu 1 , Qi Wang 2 , Zhuofan Li 2 , Bin Su 1
Advanced Materials Technologies ( IF 6.4 ) Pub Date : 2023-08-15 , DOI: 10.1002/admt.202300827 Shanfei Zhang 1 , Yamei Yue 1 , Yizhuo Xu 1 , Qi Wang 2 , Zhuofan Li 2 , Bin Su 1
Affiliation
|
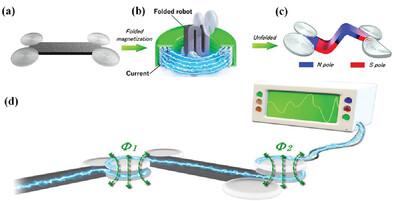
刚性机器人之间的信号传输通常通过线圈或电路板等刚性电子元件来实现。然而,由于杨氏模量的不匹配,这些刚性电子单元很难用于全柔性软机器人。液态金属(LM)作为一种具有优异导电性的柔性流体,可以作为刚性电子单元的替代材料,在全柔性软机器人中实现信号传输。本文制造了一种全柔性软机器人,它主要由两个功能单元组成:与液态金属螺旋线集成的软触手和由Nd 2 Fe 14 B磁粉/ Ecoflex复合材料制备的本体。全柔性软机器人不仅可以基于电磁感应传输电信号,还可以在外部磁场的驱动下形成多种信号传输路径。通过麦克斯韦数值模拟研究了电信号传输和驱动的相关机制。在外部磁场的驱动下,三个软机器人能够构成两条不同的路径将电信号传输到示波器。相信将LM集成到磁性复合材料中为实现全柔性软体机器人的信号传输提供了开放的视角,有利于多功能软体机器人的发展。

"点击查看英文标题和摘要"
更新日期:2023-08-15
"点击查看英文标题和摘要"



















































 京公网安备 11010802027423号
京公网安备 11010802027423号