Medical & Biological Engineering & Computing ( IF 2.6 ) Pub Date : 2023-06-16 , DOI: 10.1007/s11517-023-02850-x Qing Sun 1 , Shuai Guo 1, 2 , Sixian Fei 1
|
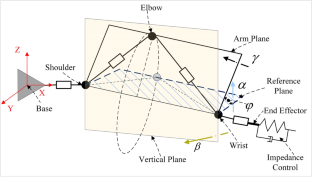
When the terminal upper limb rehabilitation robot is used for motion-assisted training, collisions between the manipulator links and the human upper limb may occur due to the null-space self-motion of the redundant manipulator. A null-space impedance control method based on a dynamic reference arm plane is proposed to realize collision avoidance during human–robot physical interaction motion for the collision problem between the manipulator links and the human upper limb. Firstly, a dynamic model and a Cartesian impedance controller of the manipulator are established. Then, the null-space impedance controller of the redundant manipulator is established based on the dynamic reference plane, which manages the null-space self-motion of the redundant manipulator to prevent collision between the manipulator links and the human upper limb. Finally, it is experimentally verified that the method proposed in this paper can effectively manage the null-space self-motion of the redundant manipulator, and thus achieve collision avoidance during the human–robot physical interaction motion. This research has significant potential in improving the safety and feasibility of motion-assisted training with rehabilitation robots.
Graphical abstract
中文翻译:
基于动态参考臂平面零空间阻抗控制的人机物理交互防撞分析
当终端上肢康复机器人用于运动辅助训练时,由于冗余机械臂的零空间自运动,可能会导致机械臂连杆与人体上肢发生碰撞。针对机械臂连杆与人体上肢的碰撞问题,提出一种基于动态参考臂平面的零空间阻抗控制方法,实现人机物理交互运动过程中的避碰。首先,建立了机械臂的动力学模型和笛卡尔阻抗控制器。然后,基于动态参考平面建立冗余机械臂的零空间阻抗控制器,管理冗余机械臂的零空间自运动,防止机械臂连杆与人体上肢发生碰撞。最后,实验验证了本文提出的方法能够有效管理冗余机械臂的零空间自运动,从而实现人机交互运动过程中的防撞。这项研究在提高康复机器人运动辅助训练的安全性和可行性方面具有巨大潜力。






























 京公网安备 11010802027423号
京公网安备 11010802027423号