Journal of the Brazilian Society of Mechanical Sciences and Engineering ( IF 1.8 ) Pub Date : 2023-05-18 , DOI: 10.1007/s40430-023-04236-4 Shenghao Tong , Huaitao Shi , Peng Zhou , Wenpo Xu , Jian Ma
|
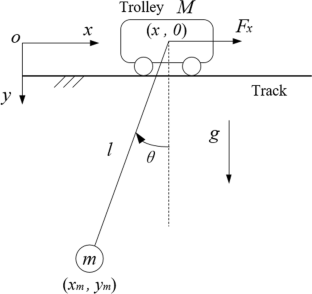
Cable crane is an important transportation tool widely used in construction and industry. With the improvement in automation requirements, the automatic positioning and anti-swing control of the crane are concerned. The different disturbances in the industrial site have a great impact on the smooth operation of the crane, which brings challenges to its positioning and anti-swing. In this paper, a novel variable structure controller is designed on the basis of the nonlinear dynamic modeling of the crane. The nonlinear system is divided into two subsystems containing displacement and swing angle information, and then, the overall sliding mode design is carried out to achieve the ideal coupling control performance. A suitable switching function term is established to solve the uncontrollable problem of non-driving variables. Aiming at the chattering problem of sliding mode control system, a fuzzy controller is designed to improve the positioning accuracy of the system. The strict stability analysis is carried out. At last, simulation and experimental results verify the superiority and effectiveness of the proposed method.
中文翻译:
基于变结构滑模的电缆起重机精确运动控制研究
电缆起重机是一种重要的运输工具,广泛应用于建筑和工业领域。随着自动化要求的提高,起重机的自动定位和防摆控制备受关注。工业现场的不同扰动对起重机的平稳运行影响很大,为其定位和防摆动带来挑战。本文基于起重机的非线性动力学建模,设计了一种新型变结构控制器。将非线性系统分为包含位移和摆角信息的两个子系统,然后进行整体滑模设计,以达到理想的耦合控制性能。建立合适的切换函数项,解决非驱动变量不可控问题。针对滑模控制系统存在的抖振问题,设计了模糊控制器来提高系统的定位精度。进行了严格的稳定性分析。最后,仿真和实验结果验证了所提方法的优越性和有效性。

















































 京公网安备 11010802027423号
京公网安备 11010802027423号