当前位置:
X-MOL 学术
›
Sci. Bull.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
仿人机器人集成智能触觉系统
Science Bulletin ( IF 18.8 ) Pub Date : 2023-04-20 , DOI: 10.1016/j.scib.2023.04.019 Rongrong Bao 1 , Juan Tao 1 , Jing Zhao 1 , Ming Dong 2 , Jing Li 1 , Caofeng Pan 1

"点击查看英文标题和摘要"
更新日期:2023-04-20
Science Bulletin ( IF 18.8 ) Pub Date : 2023-04-20 , DOI: 10.1016/j.scib.2023.04.019 Rongrong Bao 1 , Juan Tao 1 , Jing Zhao 1 , Ming Dong 2 , Jing Li 1 , Caofeng Pan 1
Affiliation
|
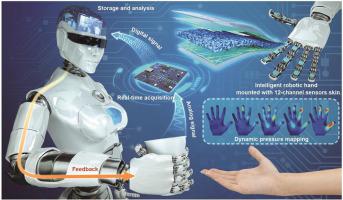
触觉是人类运动的基础。实现人工触觉是智能机器人和人工智能(AI)领域的挑战之一,因为触摸仿真依赖于高性能压力传感器阵列、信号读取、信息处理和反馈控制。在本文中,我们报告了一种集成智能触觉系统(IITS),它与类人机器人集成,以实现类人的人工触觉感知。IITS是一个闭环系统,包括多通道触觉传感电子皮肤、数据采集和信息处理芯片以及反馈控制。通过自定义的阈值压力预设值,IITS集成机器人可以灵活地抓取各种物体。IITS 在假手、太空操纵器、深海探索机器人和人机交互的设计中具有潜在的应用。
"点击查看英文标题和摘要"






























 京公网安备 11010802027423号
京公网安备 11010802027423号