当前位置:
X-MOL 学术
›
Adv. Intell. Syst.
›
论文详情
Our official English website, www.x-mol.net, welcomes your
feedback! (Note: you will need to create a separate account there.)
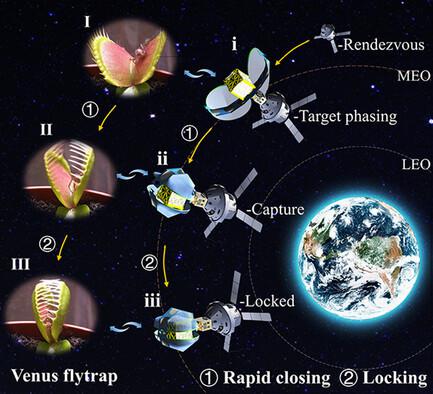
受捕蝇草启发的基于双稳态折纸的夹具,用于快速主动清除碎片
Advanced Intelligent Systems ( IF 6.8 ) Pub Date : 2023-04-06 , DOI: 10.1002/aisy.202200468 Yongchang Zhang 1 , Jiale Quan 1 , Pengchun Li 1 , Wenping Song 1, 2 , Guangyu Zhang 1 , Longqiu Li 1 , Dekai Zhou 1, 2
Advanced Intelligent Systems ( IF 6.8 ) Pub Date : 2023-04-06 , DOI: 10.1002/aisy.202200468 Yongchang Zhang 1 , Jiale Quan 1 , Pengchun Li 1 , Wenping Song 1, 2 , Guangyu Zhang 1 , Longqiu Li 1 , Dekai Zhou 1, 2
Affiliation
|
空间碎片被认为对在轨航天器构成日益严重的威胁。这个问题有几种潜在的解决方案,包括主动清除碎片。柔性机器人由于其固有的顺应性,在软操作方面表现出了良好的适应性和灵活性。这种合规性使它们能够在主动清除碎片等太空任务中安全有效地互动。在此,受维纳斯捕蝇草的双稳态结构和能量释放机制的启发,开发了一种基于双稳态折纸的夹具。柔性夹具采用仿生捕蝇草叶片曲率形式,可快速实现稳定状态切换,并使用形状记忆合金致动器进行致动。随后,采用捕蝇草刷毛状锁定结构,通过介电弹性体致动器的作用确保锁定,以减轻柔性机器人在快速致动下的振动不稳定性。实验结果表明,柔性夹具可以在大约300 ms内实现有效抓取。此外,它对复杂形状和尺寸的目标表现出良好的适应性和机械鲁棒性,表明其在空间捕获和采样领域的潜在应用。

"点击查看英文标题和摘要"
更新日期:2023-04-06
"点击查看英文标题和摘要"





























 京公网安备 11010802027423号
京公网安备 11010802027423号